

Cooperative vehicle formation driving method and system
A collaborative, vehicle-based technology, which is applied in the traffic control system, traffic control system, and arrangement of road vehicles, can solve the problem of weak robustness of the formation model, and achieve the effect of easy function expansion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
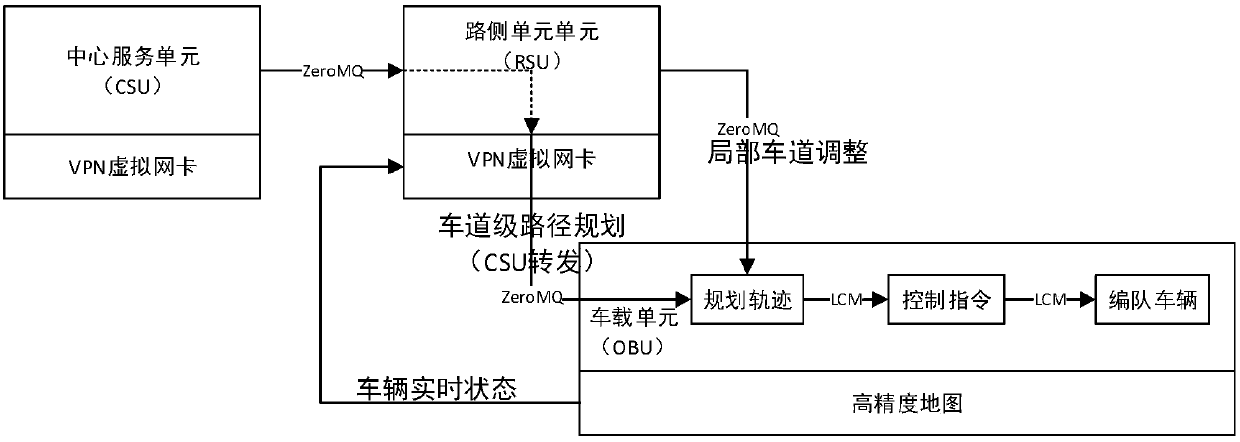
[0041] Software of the present invention is based on linux (Ubuntu) operating system development, collocation high-performance computer, center service unit (CSU) software interior uses LCM interface (public open source), external communication uses ZeroMQ (public open source), development language C, C++.
[0042] The application principle of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
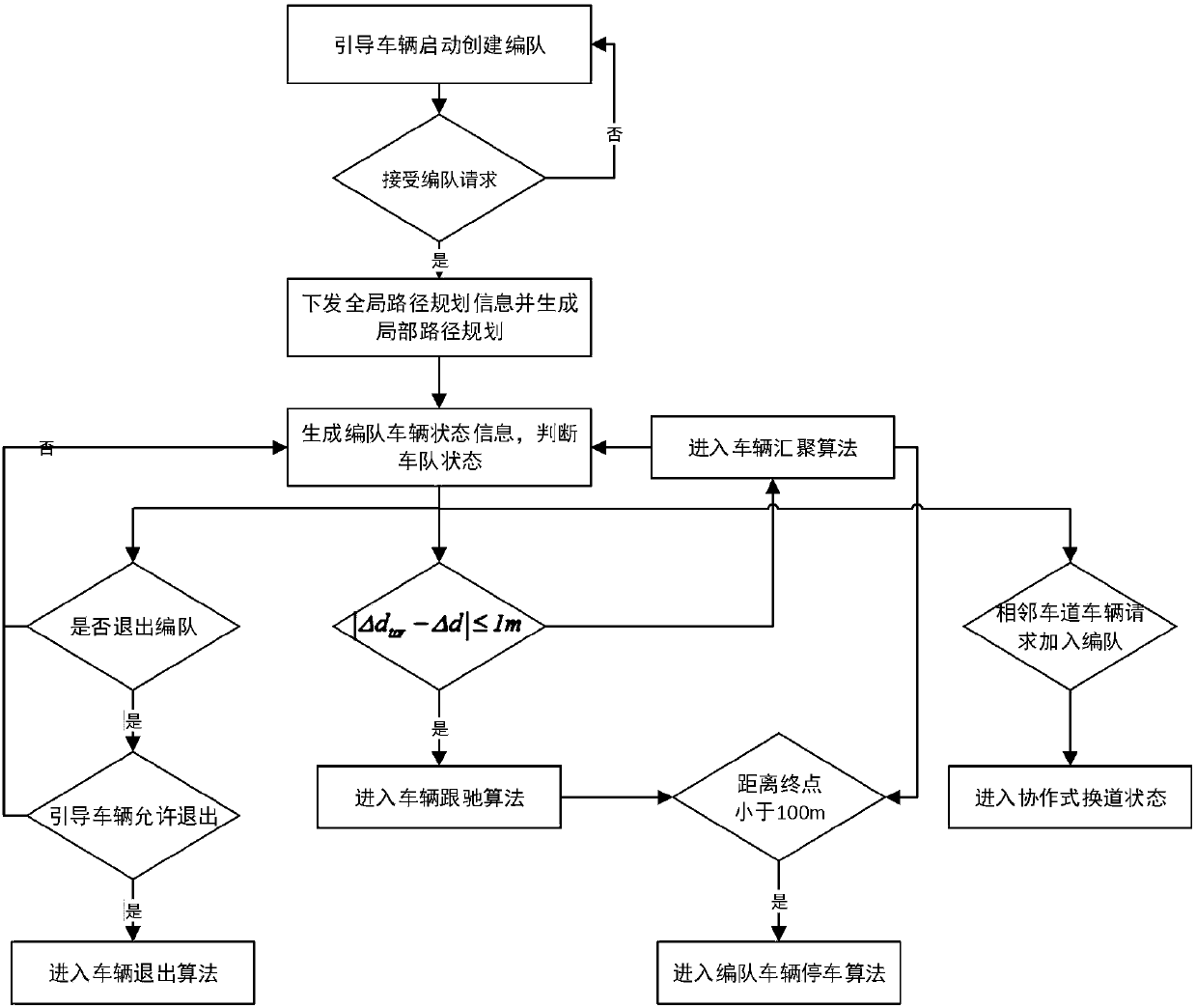
[0043] Such as figure 1 As shown, the vehicle cooperative formation driving method provided by the embodiment of the present invention includes:
[0044] St...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More