Unmanned aerial vehicle attitude tracking method and system based on multiple GPS receivers
A GPS receiver and aircraft attitude technology, applied in the field of UAV technology research, can solve problems such as failure, low IMU precision of inertial measurement unit, and reduced precision of inertial measurement unit IMU, etc., and achieve high-precision positioning results, real-time positioning results, The effect of improving safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0035] Those skilled in the art can understand that, unless otherwise defined, all terms (including technical terms and scientific terms) used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. It should also be understood that terms such as those defined in commonly used dictionaries should be understood to have a meaning consistent with the meaning in the context of the prior art, and will not be interpreted in an idealized or overly formal sense unless defined as herein Explanation.
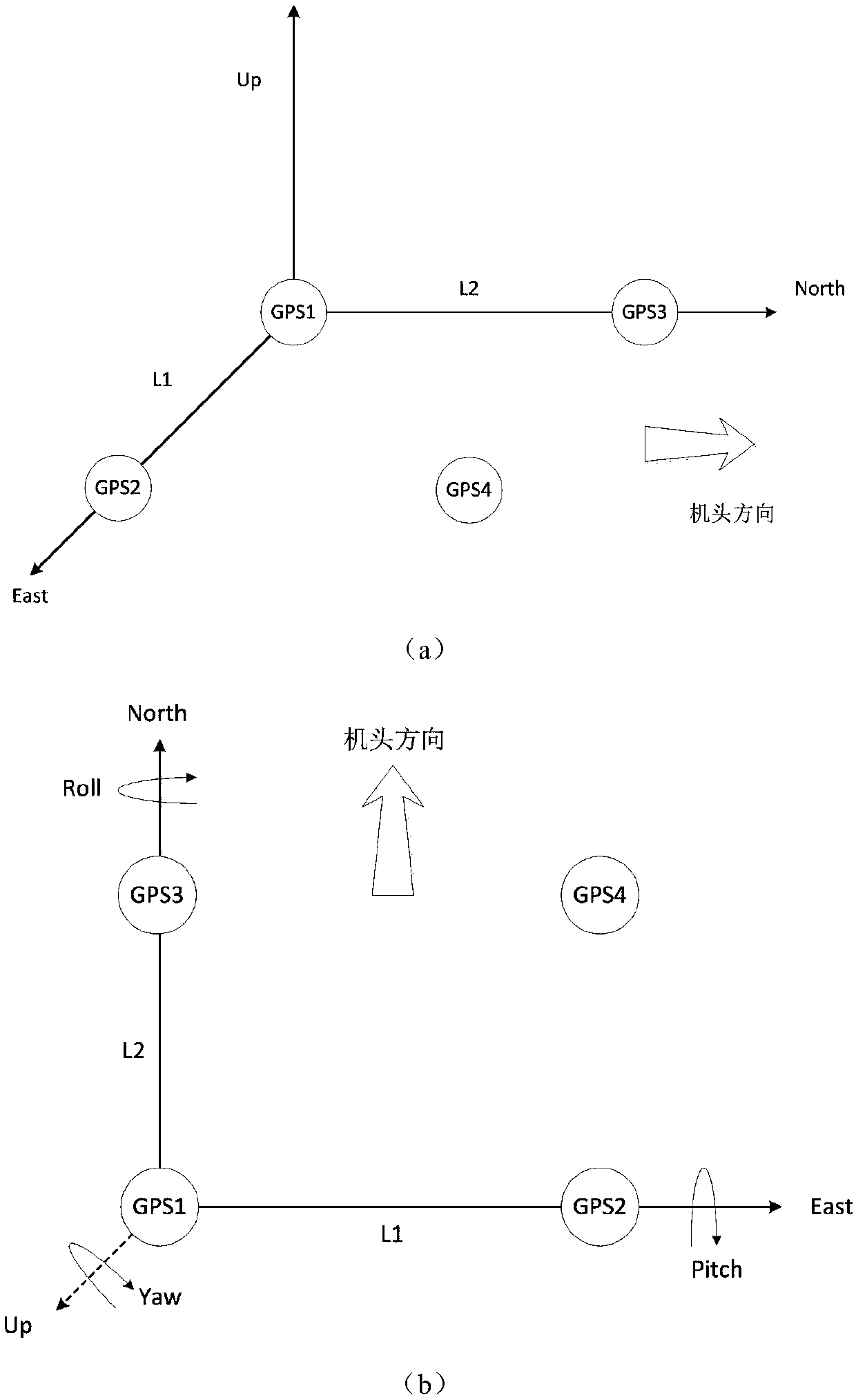
[0036] ENU: station center coordinate system, which means that the user's location point P is the coordinate origin, and the three coordinate axes are east, north and sky directions that are perpendicular to each other; for example, the station center (such as the center of the GPS receiving ante...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



