

Self-adaptive cooperative control algorithm and system of multi-wheeled robot
A wheeled robot and collaborative control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of error growth, error model representation, and not considering robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below through specific embodiments in conjunction with the accompanying drawings. These embodiments are only used to illustrate the present invention, and are not intended to limit the protection scope of the present invention.
[0047] The invention provides a multi-wheeled robot adaptive cooperative control algorithm, which comprises the following steps:
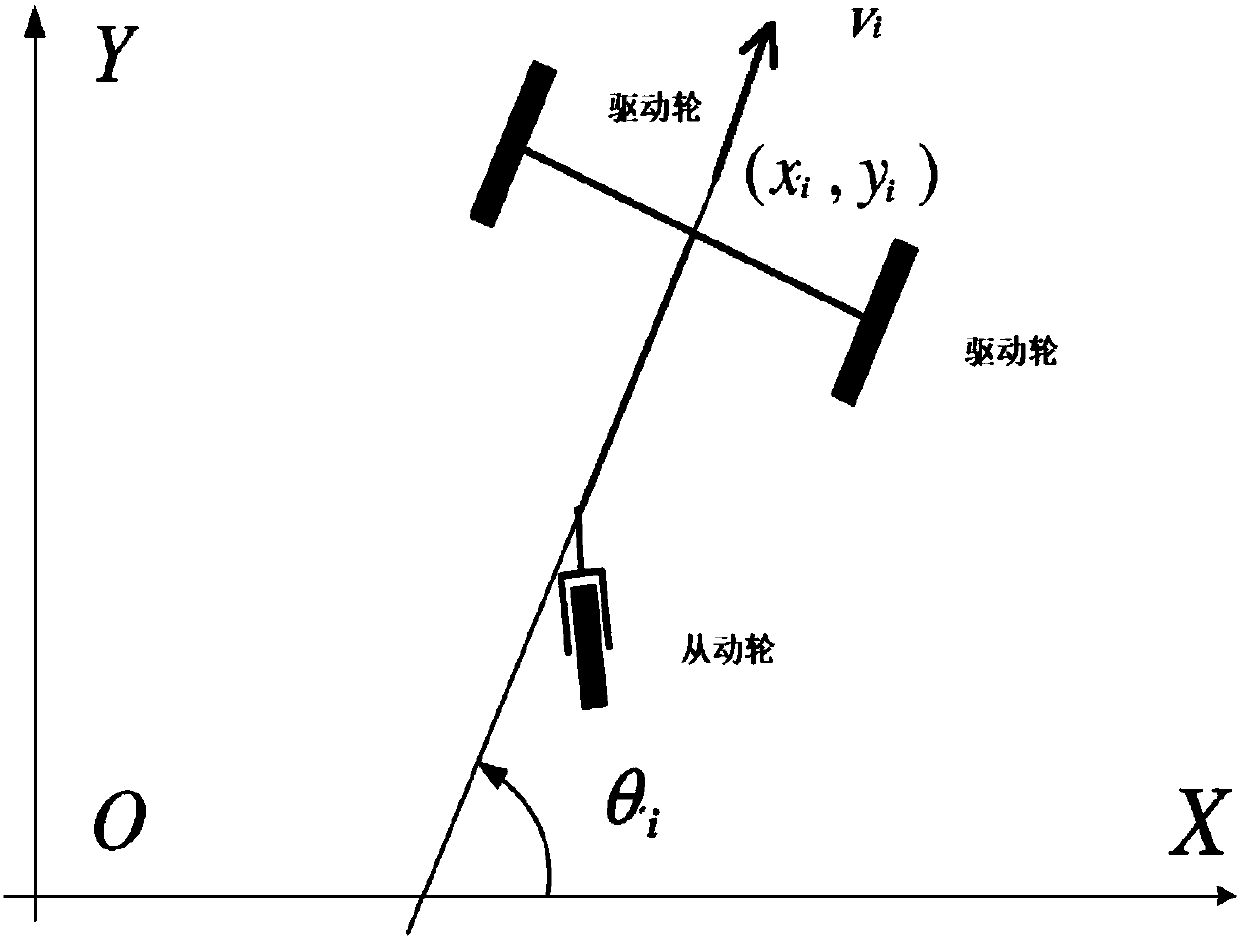
[0048] Step 1: Establish a multi-wheeled robot system containing N wheeled robots and a nonlinear dynamic model of a single wheeled robot; figure 1 Shown is a schematic diagram of a single wheeled robot system in the present invention;
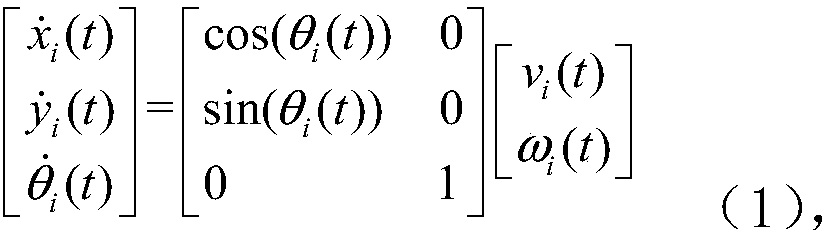
[0049] The nonlinear dynamic model is:
[0050]
[0051] in, are the speeds of the i-th wheeled robot in the direction of x and y coordinates at time t; v i (t) is the speed of the i-th wheeled robot at time t; θ i (t) is the angle of the i-th wheeled robot at time t; and ω i (t) is the angular velocity of the i-th wheeled r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More