

Electric wheel automobile steering road feeling and whole automobile stability control method
A technology for stability control of electric-wheeled vehicles, applied in the field of steering systems, which can solve the problem of steering feel and stability of electric-wheeled vehicles. Speed and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described below in conjunction with accompanying drawing.
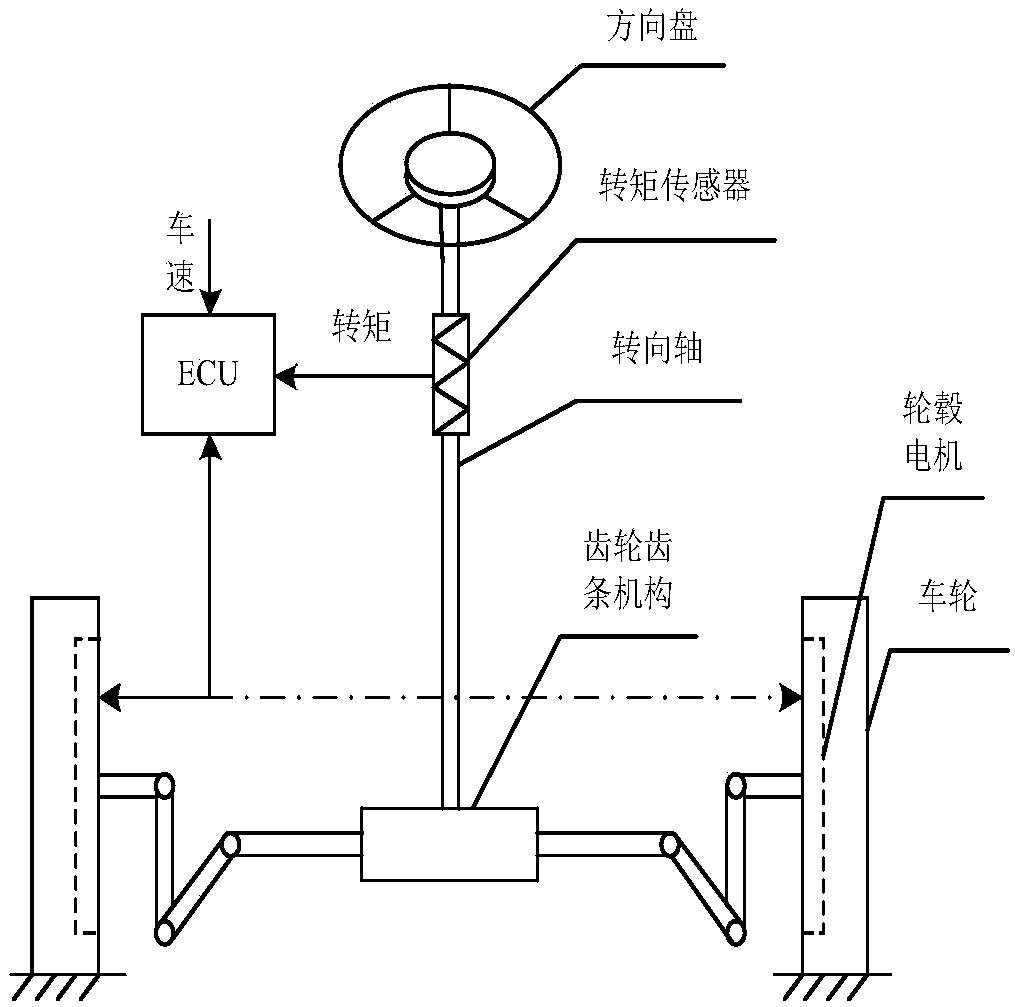
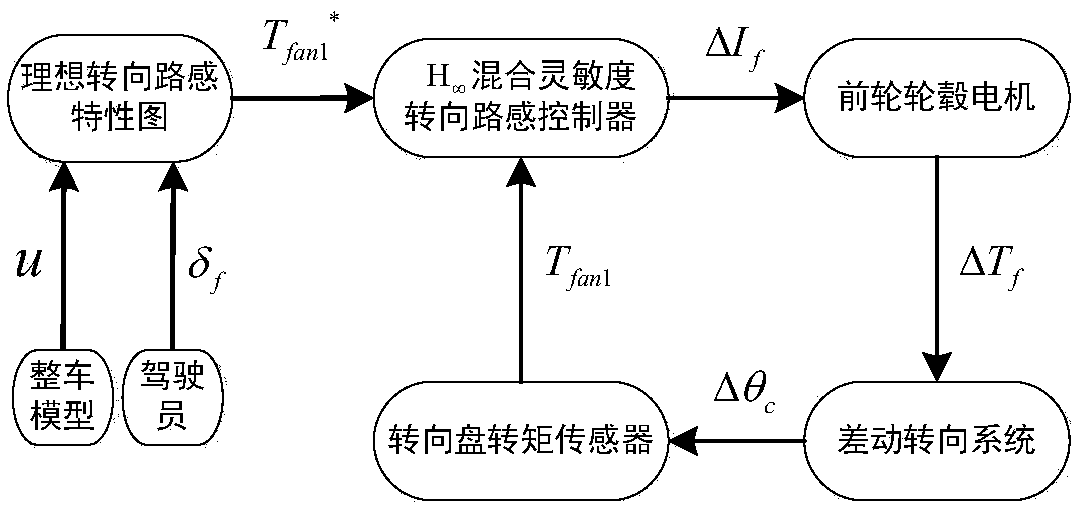
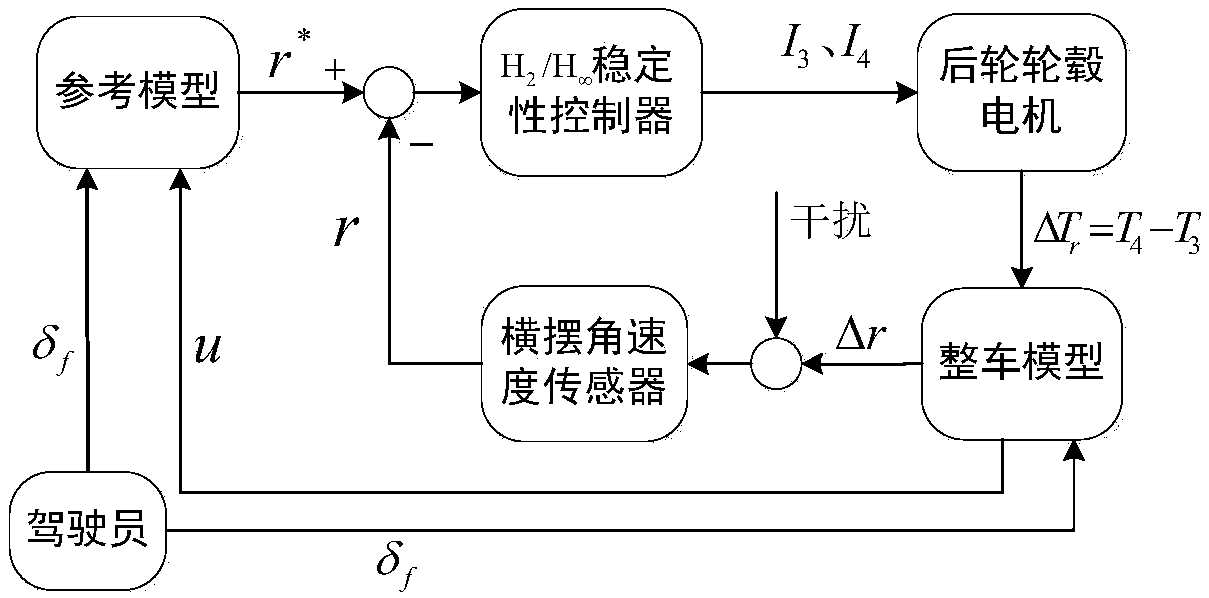
[0078] The invention provides a method for controlling steering road feel and vehicle stability of an electric wheel vehicle, such as Figure 7 shown, including the following steps:
[0079] 1) Establish steering and vehicle system dynamics models, including steering system dynamics models, vehicle models, and reference models.
[0080] Among them, the steering system dynamics model includes the steering wheel and input shaft model, the torque sensor model, the steering output shaft model, and the rack and pinion model, as shown below.
[0081] Steering wheel and input shaft model
[0082]
[0083] In the formula, J 1 is the moment of inertia of the steering wheel, θ sw is the rotation angle of the steering wheel, T d Input torque for the driver, B 1 is the steering wheel rotation damping, T fan1 is the torque sensor signal;
[0084] Torque sensor model
[0085]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More