Multiple dual-connecting-rod mechanical arm inclusion controller based on output positions and design method
A technology of double linkages and manipulators, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as computational complexity explosion, achieve the effect of simplifying complex derivation operations and overcoming computational complexity explosion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
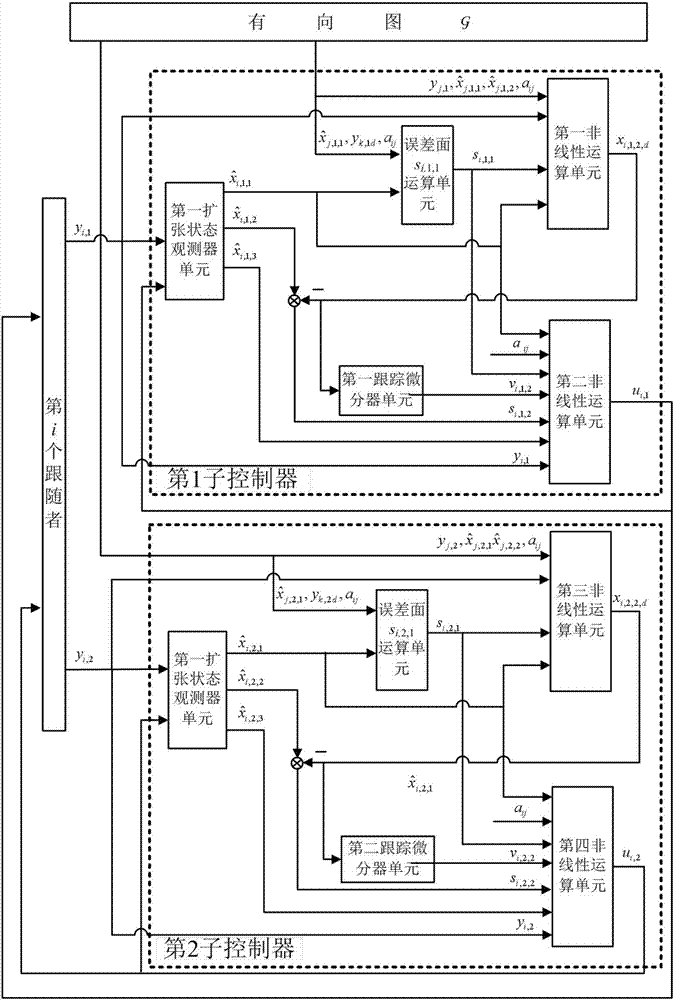
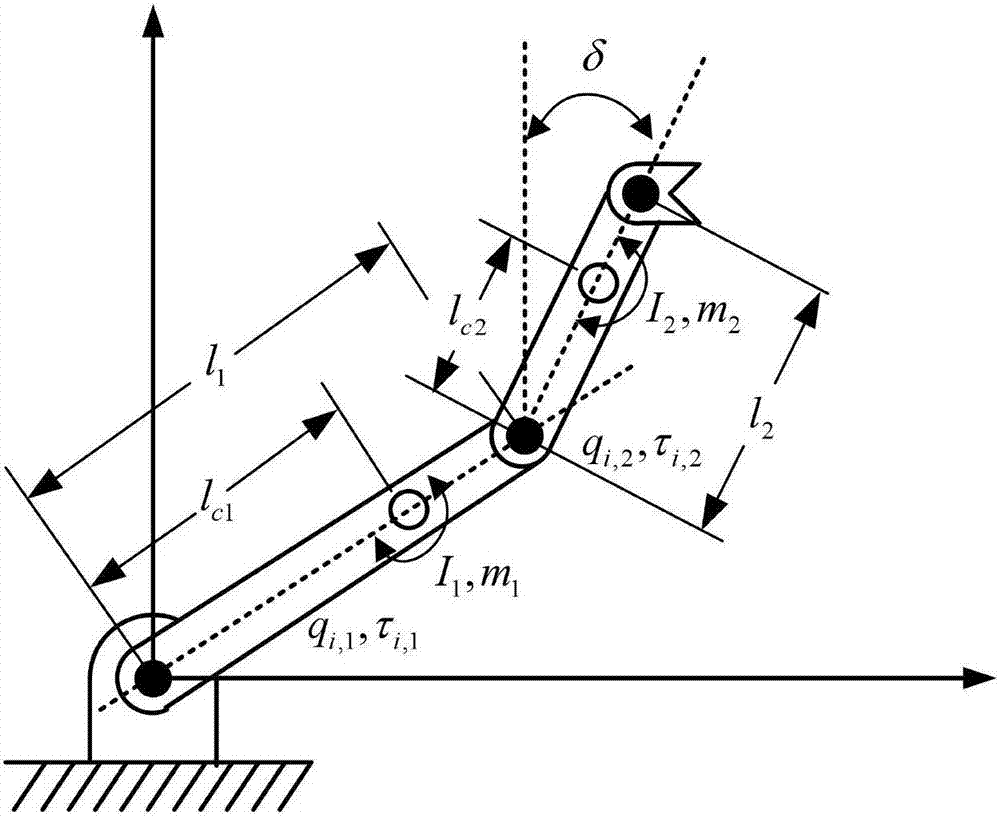
[0166] The state equation of the i-th double-link manipulator system in the follower selected by the present invention:
[0167]
[0168] In the formula, y i,1 、y i,2 Joint angular position output for the i-th follower joint 1 and joint 2, u i,1 , u i,2 The control law input for the ith follower joint 1 and joint 2, W i,11 =a 1 +2a 2 cos(y i,1 )+2a 4 sin(y i,2 ), I1 is the viscous friction coefficient of joint 1 turning to 0.12, I 2 is the viscous friction coefficient of joint 2 to 0.25, m 1 is the mass of rod 1 is 1kg, m 2 Is the mass of rod 2 is 2kg, I c2 is the distance from joint 2 to bar 2 centroid is 0.6m, a 4 =m 2 l 1 l c2 sin(δ), l 1 is the length of rod 1 is 1m, I c1 is the distance from joint 1 to the center of mass of rod 1 is 0.5m, and δ is the angle between the initial joint 2 and the longitudinal axis, which is π / 6rad. The initial values of the four follower system states are:
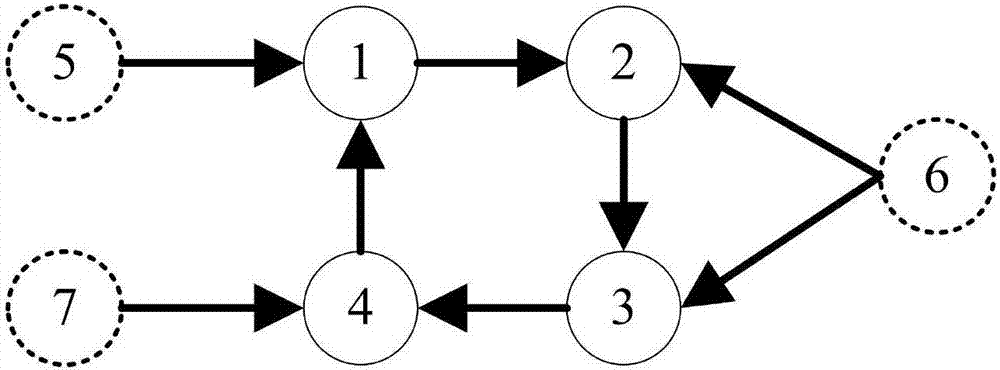
[0169] The outputs of the three leaders are: y 5,d =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More