Explosion-proof reconnaissance robot and working method
An explosion-proof, robotic technology, applied in the field of robotics, can solve problems such as the inability of robots to move forward, poor applicability and adaptability, and delays in the handling of accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] Below are specific embodiments of the present invention, technical scheme of the present invention is described further, but protection scope of the present invention is not limited to these embodiments. All changes or equivalent substitutions that do not depart from the concept of the present invention are included within the protection scope of the present invention.
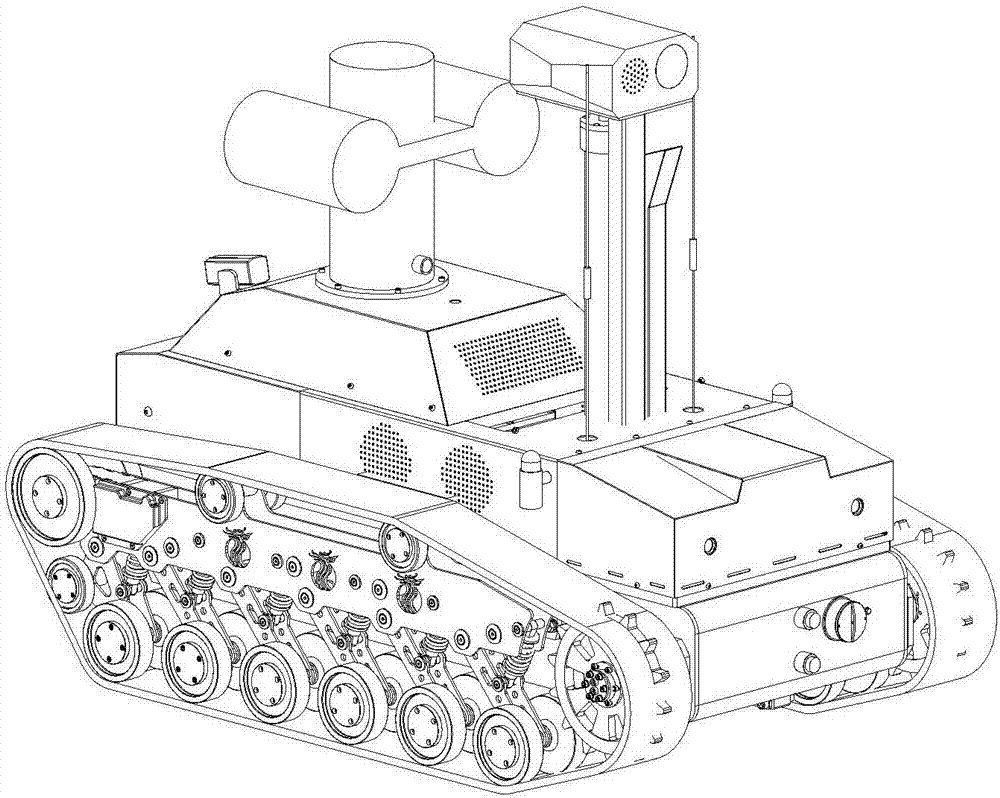
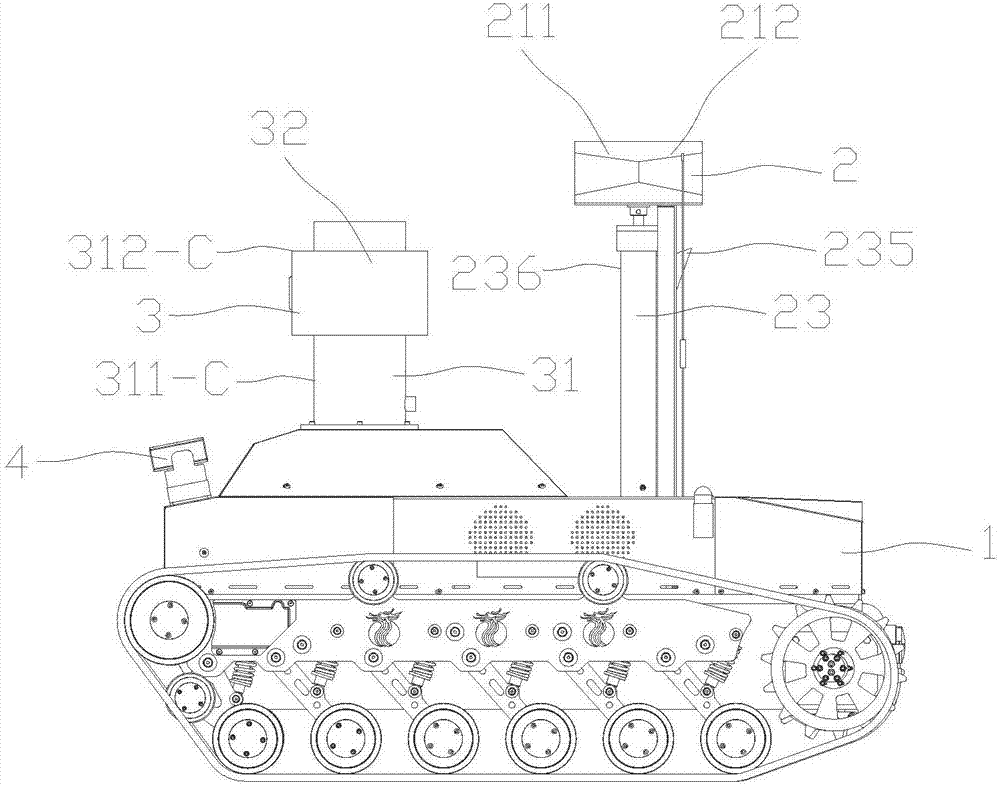
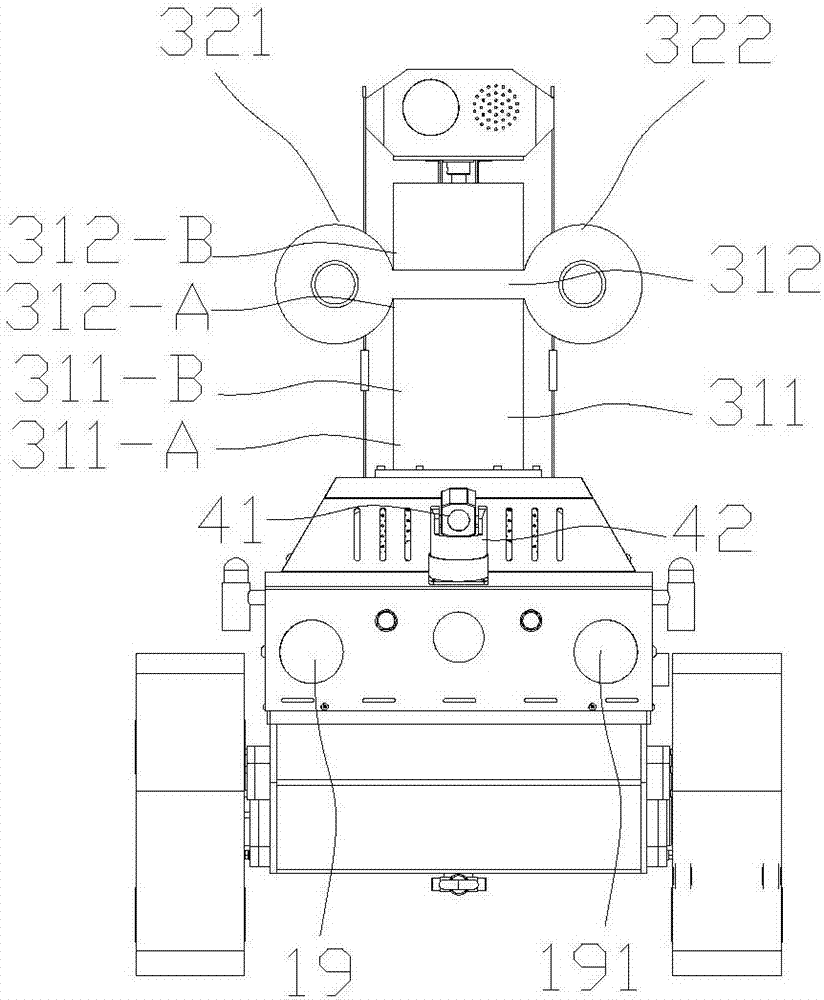
[0081] Such as Figure 1-12 As shown, an explosion-proof reconnaissance robot includes an explosion-proof reconnaissance robot mobile platform 1, an explosion-proof environmental parameter acquisition mechanism 2, an explosion-proof infrared data acquisition mechanism 3, an explosion-proof camera mechanism 4 and a host computer console 5. The explosion-proof Type environmental parameter acquisition mechanism 2, explosion-proof infrared data acquisition mechanism 3, and explosion-proof camera mechanism 4 are all fixedly installed on the explosion-proof reconnaissance robot mobile platform 1, and the uppe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More