

Synchronous control method of annular coupling type multi-axis robot system
A multi-axis robot and synchronous control technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of inability to take into account the correlation of each axis, poor synchronization of multi-axis robot control system, etc., and achieve rapid improvement Convergence performance, enhanced trajectory tracking accuracy, and improved dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
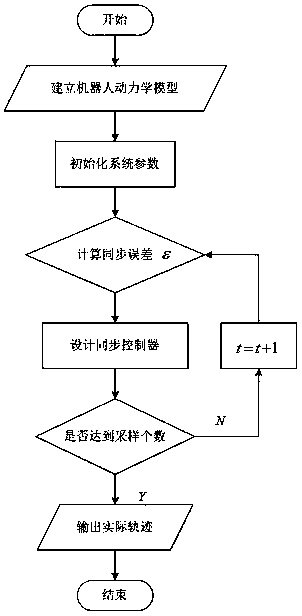
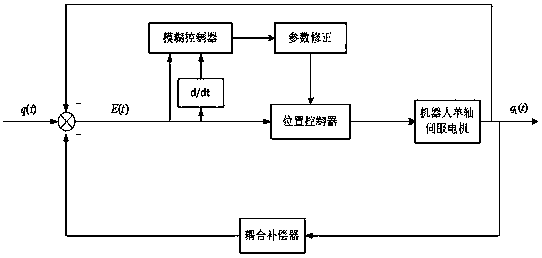
[0059] A synchronous control method for a ring-coupled multi-axis robot system, characterized in that the robot system includes: a robot controller, a multi-axis servo motor as a controlled object, a plurality of position controllers corresponding to the multi-axis servo motor, and A plurality of processing modules corresponding to the multi-axis servo motor, and a plurality of position sensors corresponding to the multi-axis servo motor; the position controller, the processing module and the position sensor are all connected to the robot controller, and the robot controller and the drive of each axis of the robot The device is connected, the input end of the position controller is connected to the corresponding processing module, the output end of the controller is connected to the robot controller, and the position sensor is used to detect the axis position of the robot; these are the control system of a robot.
[0060] When a given position changes,
[0061] 1) The robot co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More