

Multi-feature complex lane line extraction method based on visual sense
An extraction method and road line technology, which can be used in image data processing, instrumentation, computing, etc., and can solve problems such as low robustness and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
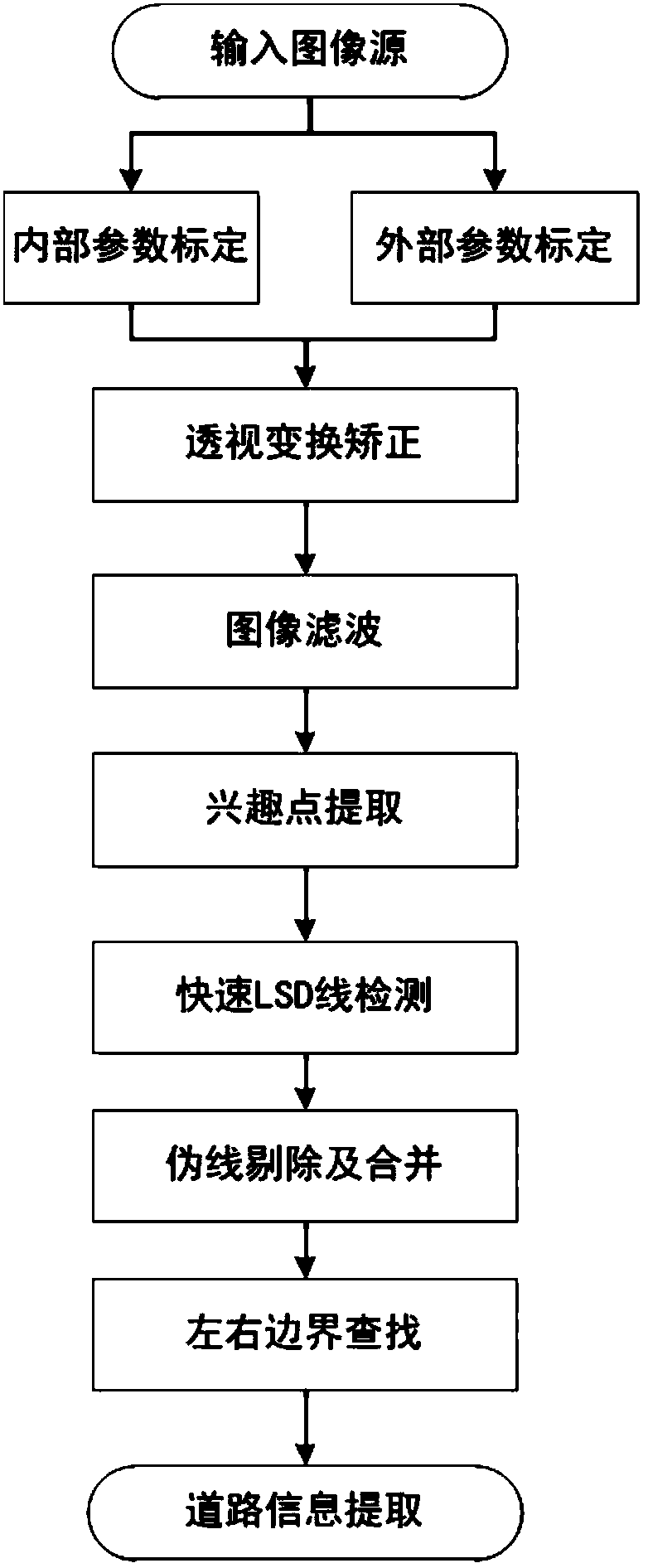
[0033] Such as figure 1 As shown, a complex road line extraction method based on visual multi-features includes the following steps:
[0034] S1: Camera Calibration
[0035] Convert the input image source to a grayscale image, calculate the gradient of the grayscale image, and obtain the gradient image; secondly, use the gradient image to calculate the coordinates of the feature points of the checkerboard grid, obtain the coordinate mapping relationship of the corresponding position through iteration, and calculate the calibration parameter point matrix. The calibration parameter point matrix depicts the calibration correspondence between internal and external parameters of the camera.
[0036] According to the pinhole camera parameter model, the internal parameters of the camera are mainly the coordinates of the principal point (cx ,c y ), and the focal length pixel component f x ,f y . When calibrating the internal parameters, only the coincidence of the vehicle coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More