

Unmanned aerial vehicle real-time moving target classification and detection method based on vision
A technology for moving targets and detection methods, which is applied in radio wave measurement systems, photogrammetry/video measurement, measurement devices, etc. Robustness, the effect of solving computing power problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] In order to make the purpose and technical solution of the present invention clearer, the technical solution of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention.
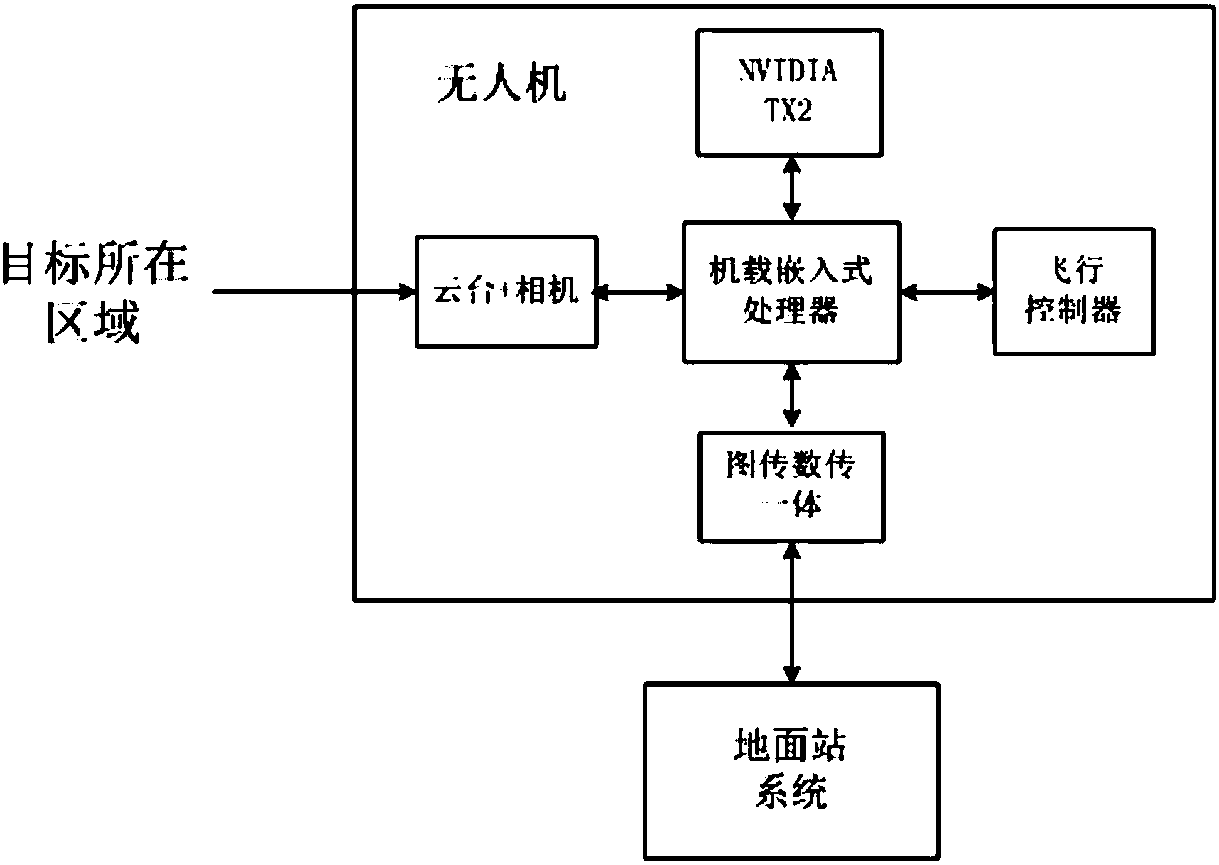
[0061] Such as figure 1 As shown, the unmanned aerial vehicle system includes the unmanned aerial vehicle and the ground station system, wherein the unmanned aerial vehicle includes the main body of the unmanned aerial vehicle and the gimbal, camera, onboard embedded processor, NVIDIA Jetson TX2 and The flight controller, camera, NVIDIA Jetson TX2, the flight controller and the all-in-one image transmission and digital transmission machine are connected with the onboard embedded processor through wires, and the drone and the ground station system communicate wirelessly through wireless digital transmission equipment.
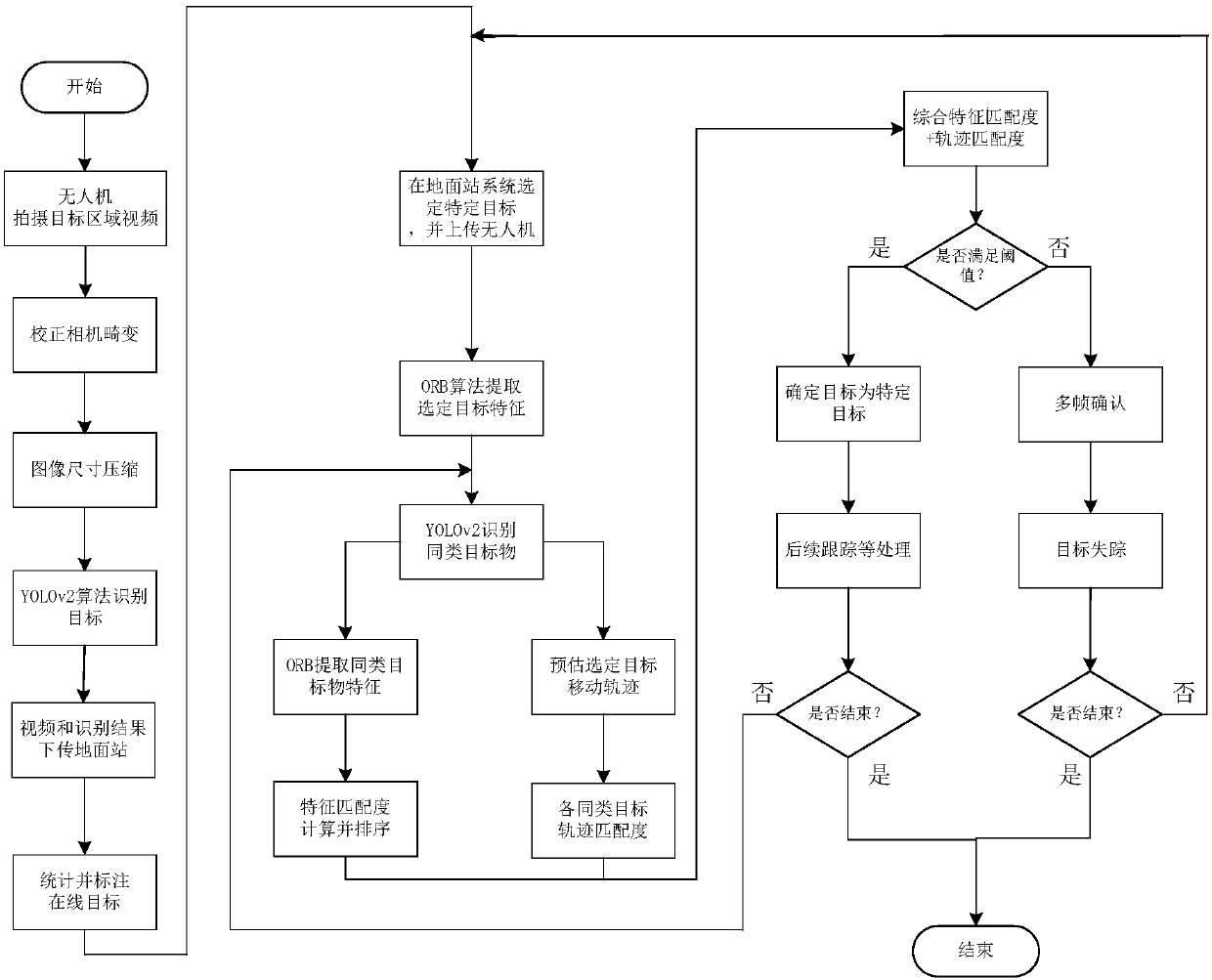
[0062] In this embodiment, the identification and detection of the target by the UAV system includes the followi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More