

Robot path planning algorithm based on optimized ant colony algorithm
An ant colony algorithm and path planning technology, applied in the direction of navigation computing tools, etc., can solve the problems of falling into local optimum, poor adaptability, easy to fall into local optimum, etc., and achieve the effect of improving search efficiency and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0035] The technical scheme that the present invention solves the problems of the technologies described above is:
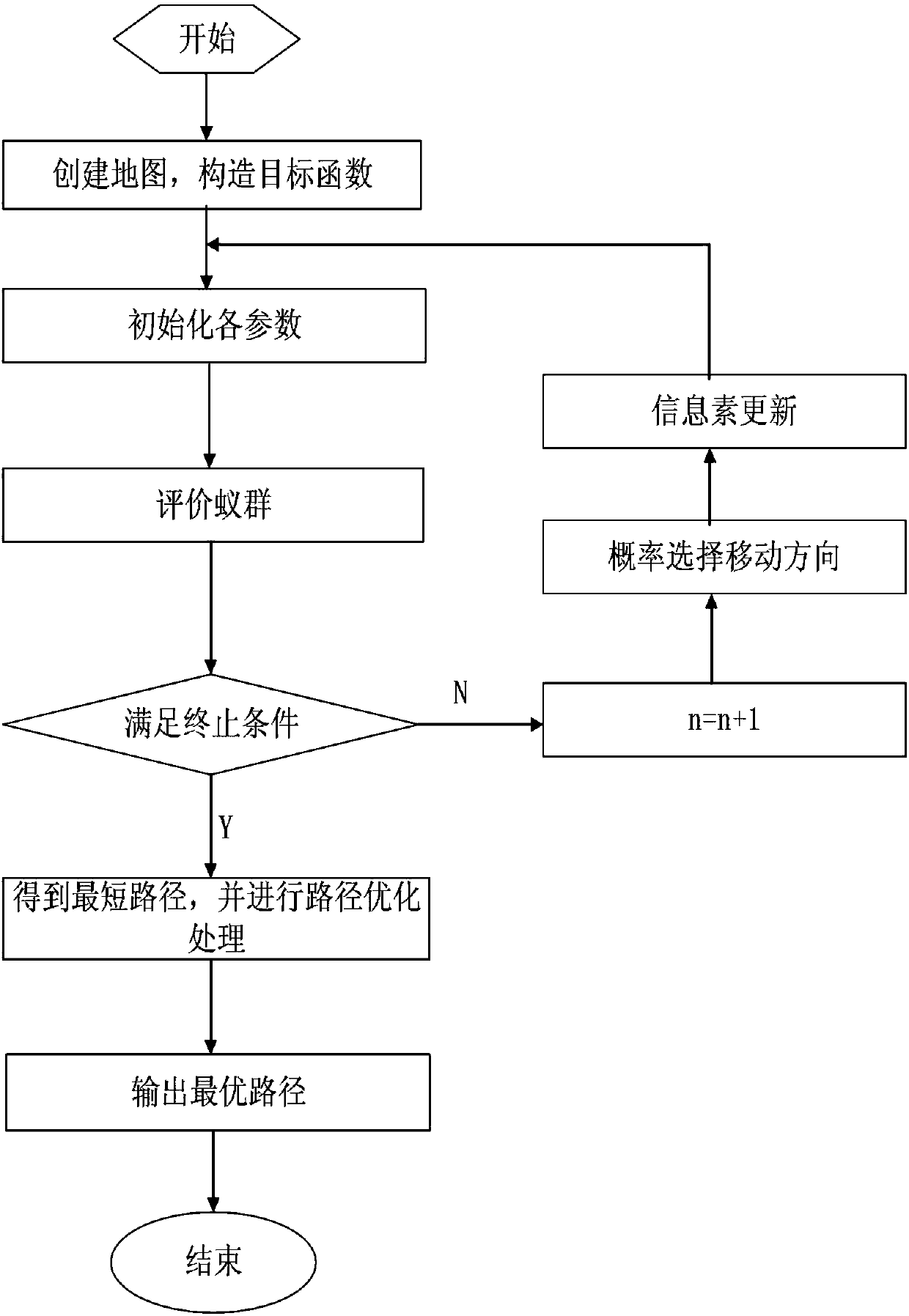
[0036] Such as figure 1 As shown, the present invention provides a kind of mobile robot synchronous localization and map construction based on Gaussian distribution, and it comprises the following steps:
[0037] S1 inputs a matrix composed of 0 and 1 to represent the map that the robot needs to find the optimal path to establish the objective function;
[0038] S2 initializes each parameter. Including the unit length of the establishment of the grid; the basic parameters of the artificial potential field function; such as the gravitational coefficient; the number of ants searched by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More