

Fuzzy control method based on event trigger strategy for non-linear inverted pendulum system
A technology of fuzzy control and event triggering, which is applied in the control field of nonlinear inverted pendulum system to achieve good stability, reduce communication burden, and save bandwidth resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0054] The fuzzy control method based on the event-triggered strategy of the nonlinear inverted pendulum system in this embodiment includes the following steps:
[0055] The fuzzy control method based on event-triggered strategy of nonlinear inverted pendulum system is characterized in that: comprising the following steps:
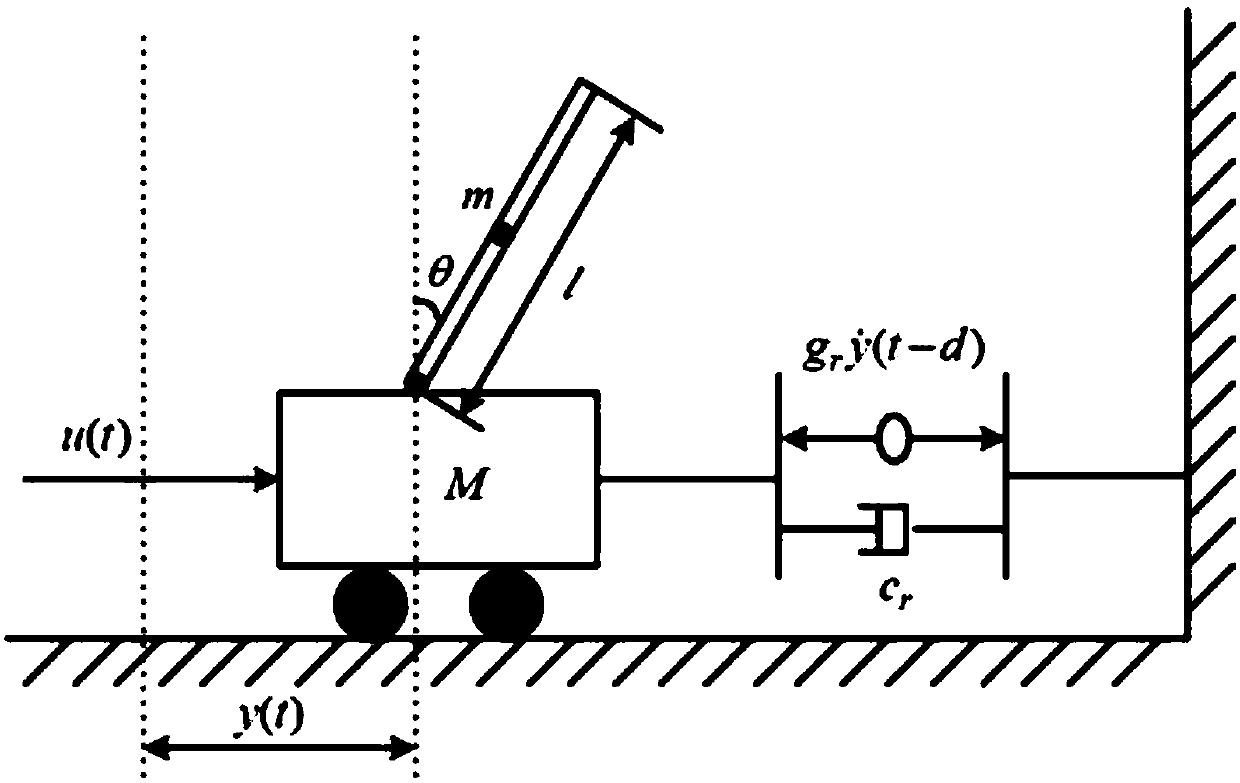
[0056] Step 1, establish the dynamic mathematical model of the inverted pendulum system with delay resonator as:
[0057]
[0058]
[0059] The inverted pendulum system includes a trolley, a swing link hinged on the top of the trolley, and a delay resonator that exerts resistance to the movement of the trolley: in the above formula, M is the mass of the trolley, m is the mass of the swing link, l is the length of the swing link, and g is Gravity acceleration, θ is the swing angle of the pendulum from the upright position, y i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More