

Intelligent vehicle lateral control method and system based on segmented affine fuzzy sliding mode
A piecewise affine and lateral control technology, applied in the control/regulation system, two-dimensional position/course control, vehicle position/route/height control, etc., can solve the problem of affecting ride comfort and stability, and cannot respond accurately Vehicle status, short response time, etc., to achieve the effect of ensuring driving safety, short response time, and short robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] A kind of intelligent vehicle lateral control method based on segmented affine fuzzy sliding mode, is used for controlling the steering wheel angle of target vehicle, to realize the lateral control to described target vehicle in driving process; comprises the following steps:
[0057] Step S101, collect the expected path of the target vehicle in real time, the yaw rate ω r , speed v x and the center of mass sideslip angle β.
[0058] The collection of the above data can be realized in various ways. This embodiment provides a specific example as a reference: in the step S101, the method of collecting the desired path in real time is specifically: using an industrial camera to identify the target vehicle in real time The lane line ahead, and fit the desired path (specifically, the MER1920-41GM model camera of Daheng Image, the lens model VS 0816-5M can be used. Through the visual studio development platform, the OpenCV function library is used to complete the lane line. I...
Embodiment 2
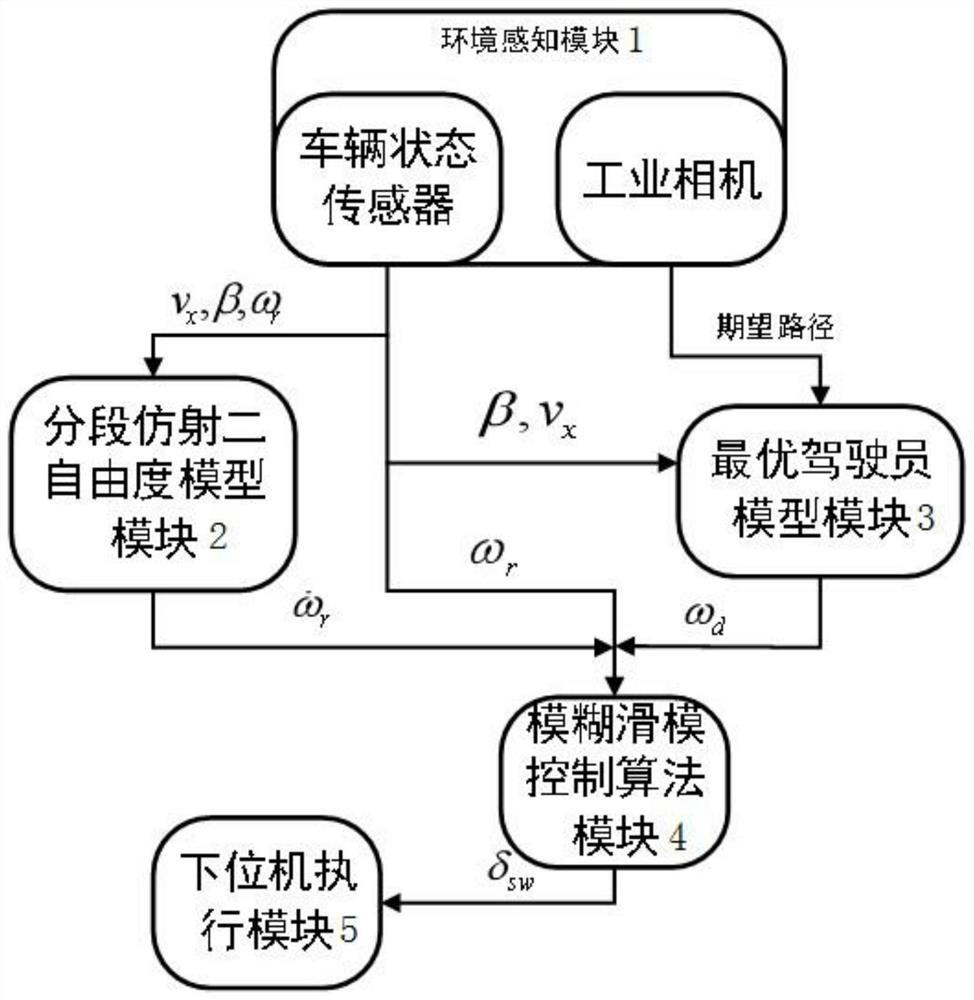
[0137] An intelligent vehicle lateral control system based on segmented affine fuzzy sliding mode, corresponding to the control method of embodiment 1, used to control the steering wheel angle of the target vehicle, so as to realize the lateral control of the target vehicle during driving ; the system includes:
[0138] Environmental perception module 1, used for:
[0139] Collect the expected path of the target vehicle in real time, the yaw rate ω r , speed v x and the center of mass sideslip angle β.
[0140] The environment perception module 1 may specifically include components such as industrial cameras, inertial navigation and wheel speed sensors. Wherein, the front lane line of the target vehicle is recognized in real time by using an industrial camera, and the desired path is fitted (specifically, the MER1920-41GM model camera of Daheng Image, the lens model VS 0816-5M can be used. Through visual studio The development platform uses the OpenCV function library to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More