

Intelligent vehicle steering control system and method based on piecewise affine layered control
A segmented affine, layered control technology, applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve vehicle instability, cannot accurately reflect vehicle status, and cannot solve the control requirements and control of autonomous steering control systems. function and other issues to achieve the effect of improving control accuracy and improving vehicle stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
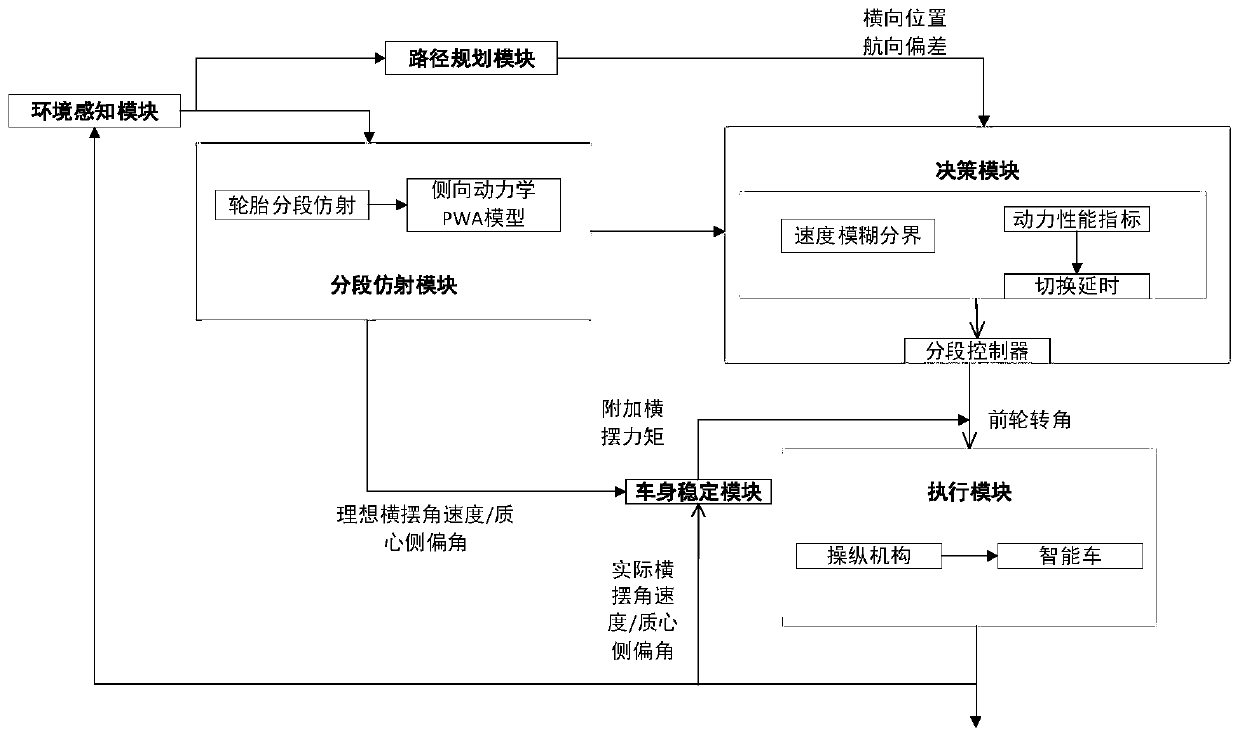
[0089] The present invention will be further described below in conjunction with accompanying drawing.
[0090] Step1: Environmental perception module
[0091] Real-time collection of road information ahead of the smart car, yaw rate γ, vehicle speed v x , and the side slip angle β of the center of mass;
[0092] Step2: Path planning module
[0093] Plan a barrier-free expected path based on the data transmitted by the perception module;
[0094] Step3: piecewise affine module
[0095] The relationship between tire slip angle and deflection force is segmented into affine, and the model parameter identification of the segmental affine system includes data subspace segmentation, linear model parameter estimation of each subspace, and switching surface equation coefficient estimation. The test data of tire slip angle and lateral force under various working conditions are collected by multi-dimensional force sensors, and the parameter identification of the segmented affine mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More