

Robot positioning method, electronic equipment, storage medium, and apparatus
A robot positioning and robot technology, applied in measuring devices, instruments, surveying and navigation, etc., can solve the problems of low positioning cost, positioning failure, and failure to establish data association, etc., and achieve low positioning cost, good motion constraints, and enhanced robustness sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] In the following, the present invention will be further described in conjunction with the drawings and specific implementations. It should be noted that, provided that there is no conflict, the following embodiments or technical features can be combined to form new embodiments. .
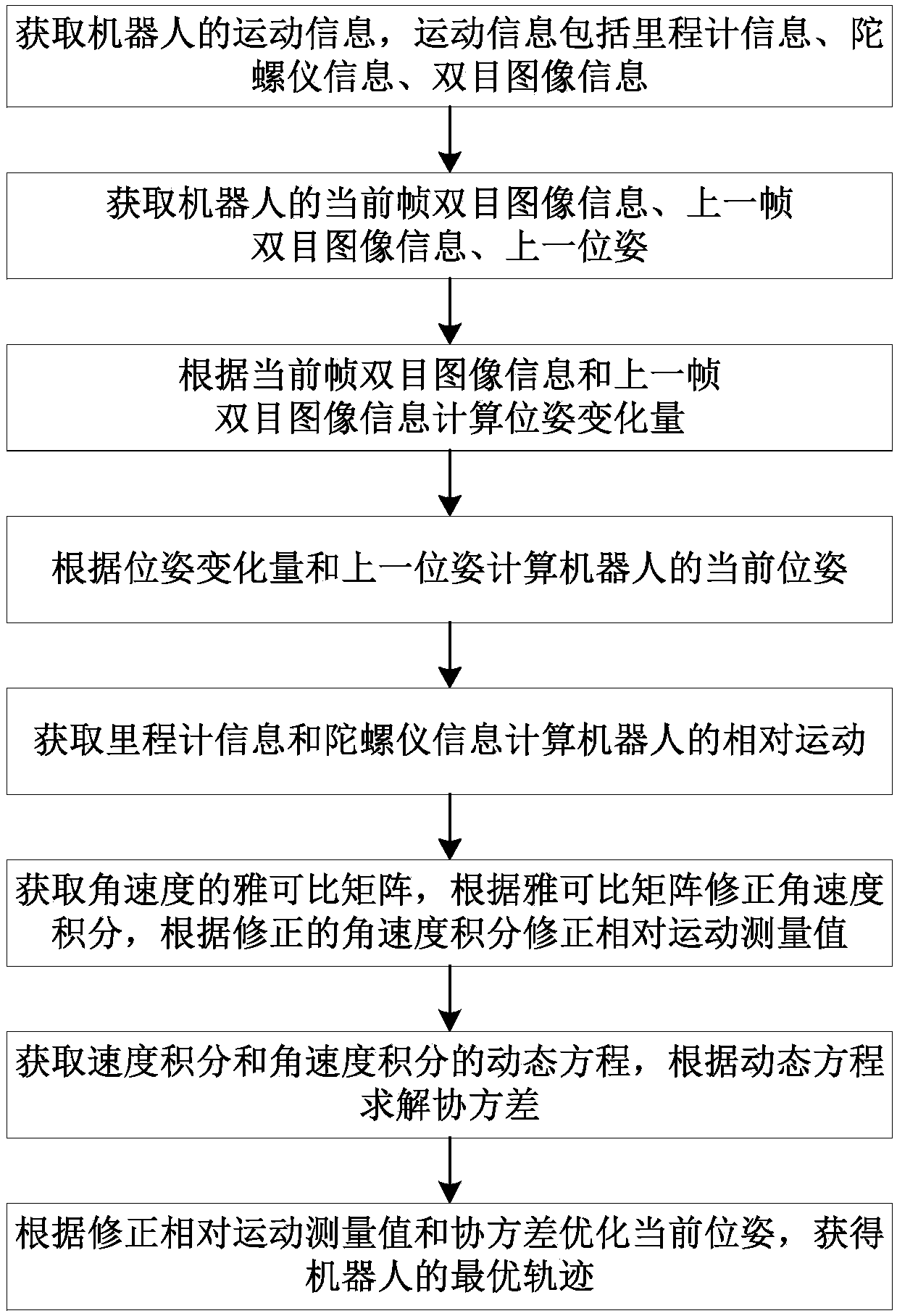
[0054] A robot positioning method, such as figure 1 As shown, including the following steps:
[0055] Obtain motion information, obtain the motion information of the robot, the motion information includes odometer information, gyroscope information, binocular image information, and binocular image information is the image information of the binocular camera;
[0056] Estimate the current pose and estimate the current pose of the robot based on the binocular image information; the pose of the robot is the position and orientation of the robot at a certain moment, usually by the translation component T i And the rotation component R i Means, where:
[0057] T i ∈R 3
[0058] R i ∈R 3 ,R i =-R i T ,R i T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More