

Indoor AGV navigation method and system based on QR code guidance and visible light positioning
A navigation method and two-dimensional code technology are applied in the field of mobile robot trolleys, which can solve the problems of expensive equipment, high cost of measuring equipment, and high requirements for time measurement accuracy, and achieve the effect of low cost and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
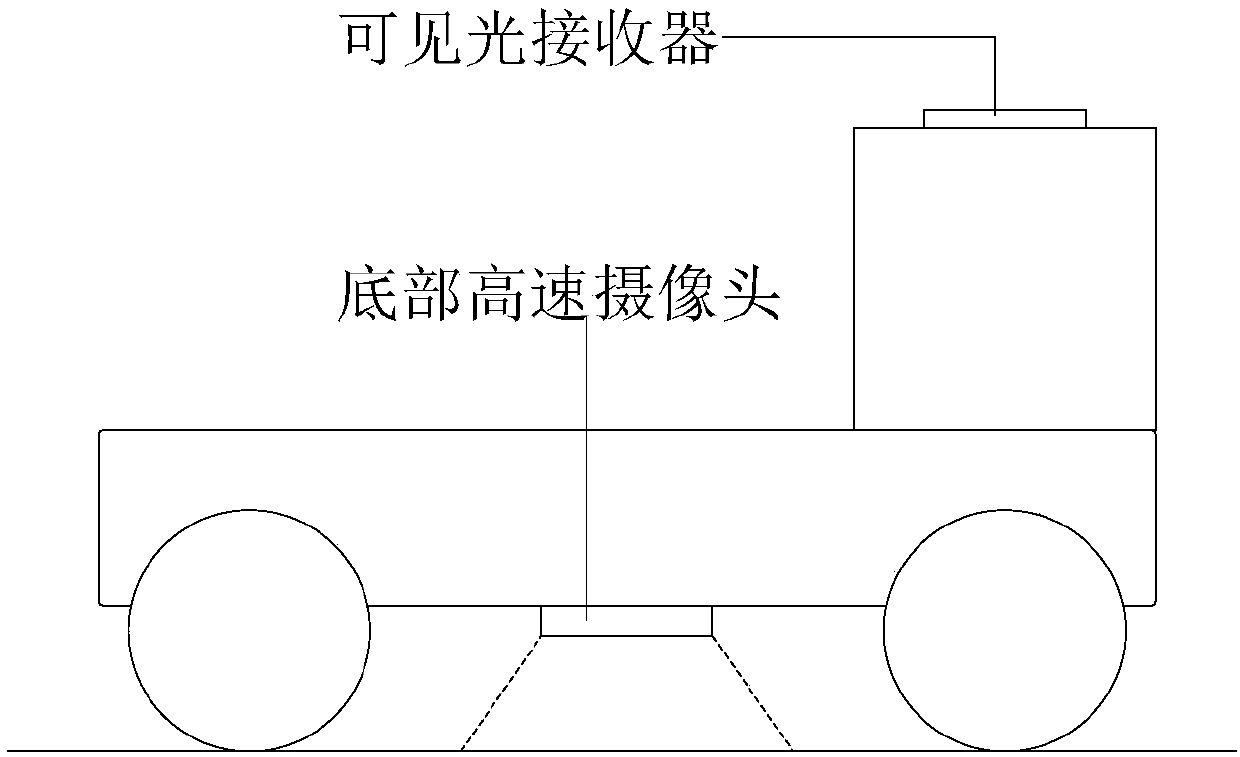
[0049] An indoor AGV navigation method and system based on two-dimensional code guidance and visible light positioning, the system includes: LEDs that transmit specific light information, visible light receivers installed on the top of the AGV, two-dimensional code labels containing direction information, and installed on the AGV High-speed camera and navigation CPU module at the bottom;
[0050] The visible light receiver and the high-speed camera are connected with the navigation CPU module through an electrical connection, and are controlled by the navigation CPU module. The navigation CPU module is connected to the motion control CPU of the AGV, and transmits position information and heading information. The motion control CPU adjusts the AGV running state according to the position information and heading information.
[0051] The implementation methods specifically include:
[0052] Step 1: Install 3 to 4 LEDs that transmit specific light information at appropriate plac...
Embodiment 2
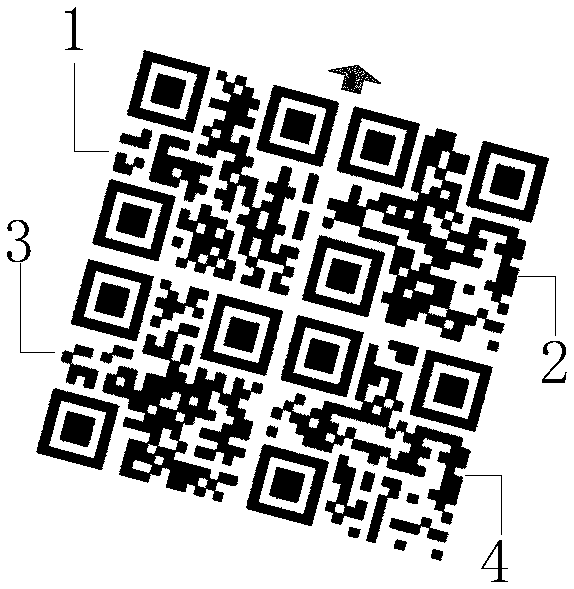
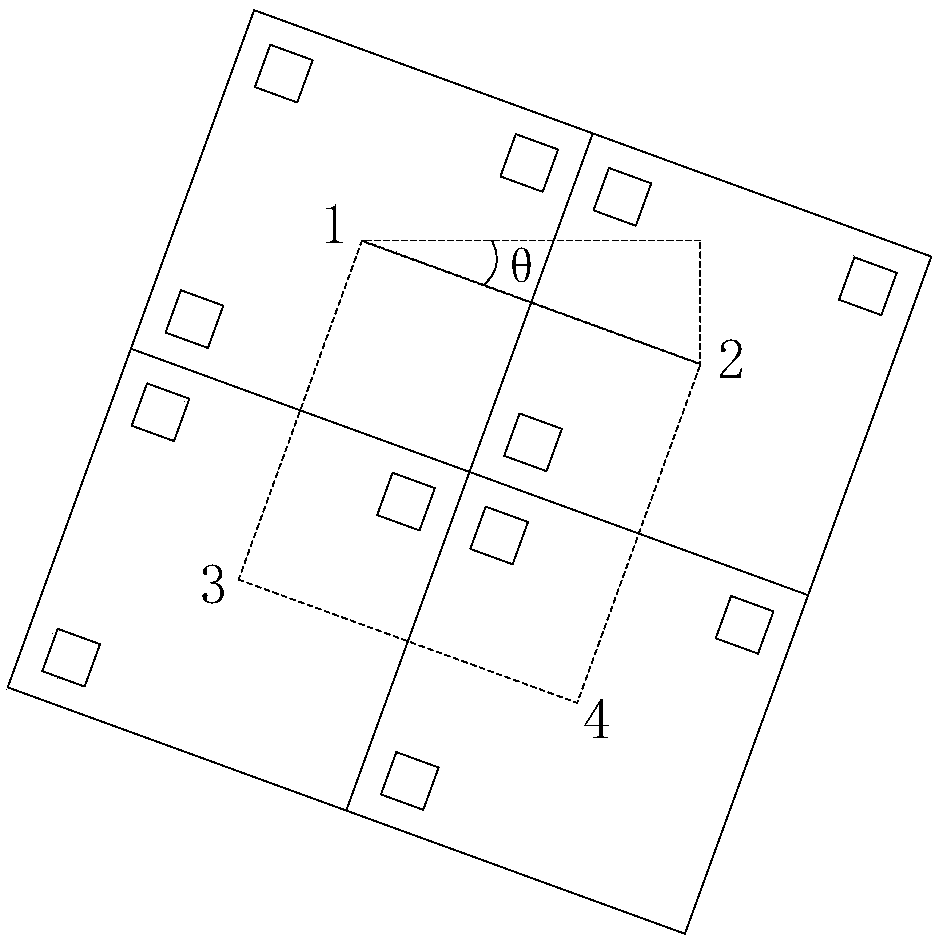
[0075] The two-dimensional code label used in this embodiment is as figure 1 As shown, the label is composed of 4 QR codes containing different digital information, such as 1, 2, 3, 4. When analyzing the two-dimensional code label image, it is through figure 2 The high-speed camera at the bottom shown captures the two-dimensional code label image, recognizes the digital information contained in each two-dimensional code, and calculates the coordinates of each two-dimensional code center point (u 1 ,v 1 ),(u 2 ,v 2 ),(u 3 ,v 3 ),(u 4 ,v 4 ), and then calculate the deviation angle θ between the direction indicated by the two-dimensional code label and the direction of the AGV car, such as image 3 shown.
[0076] Below to Figure 4 This method is explained in detail in the specific situation.
[0077] First establish the indoor space coordinate system (x, y). The AGV is at the starting point at the beginning, and the position coordinates at the starting point obtaine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More