

Multi-type power system control distribution method and related device
A power system and control distribution technology, applied in the field of aircraft control, can solve the problems of dynamic response without special processing, response speed, power system early saturation and large output, etc., to avoid premature saturation or excessive large output, improve Robustness, effect of maintaining response accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
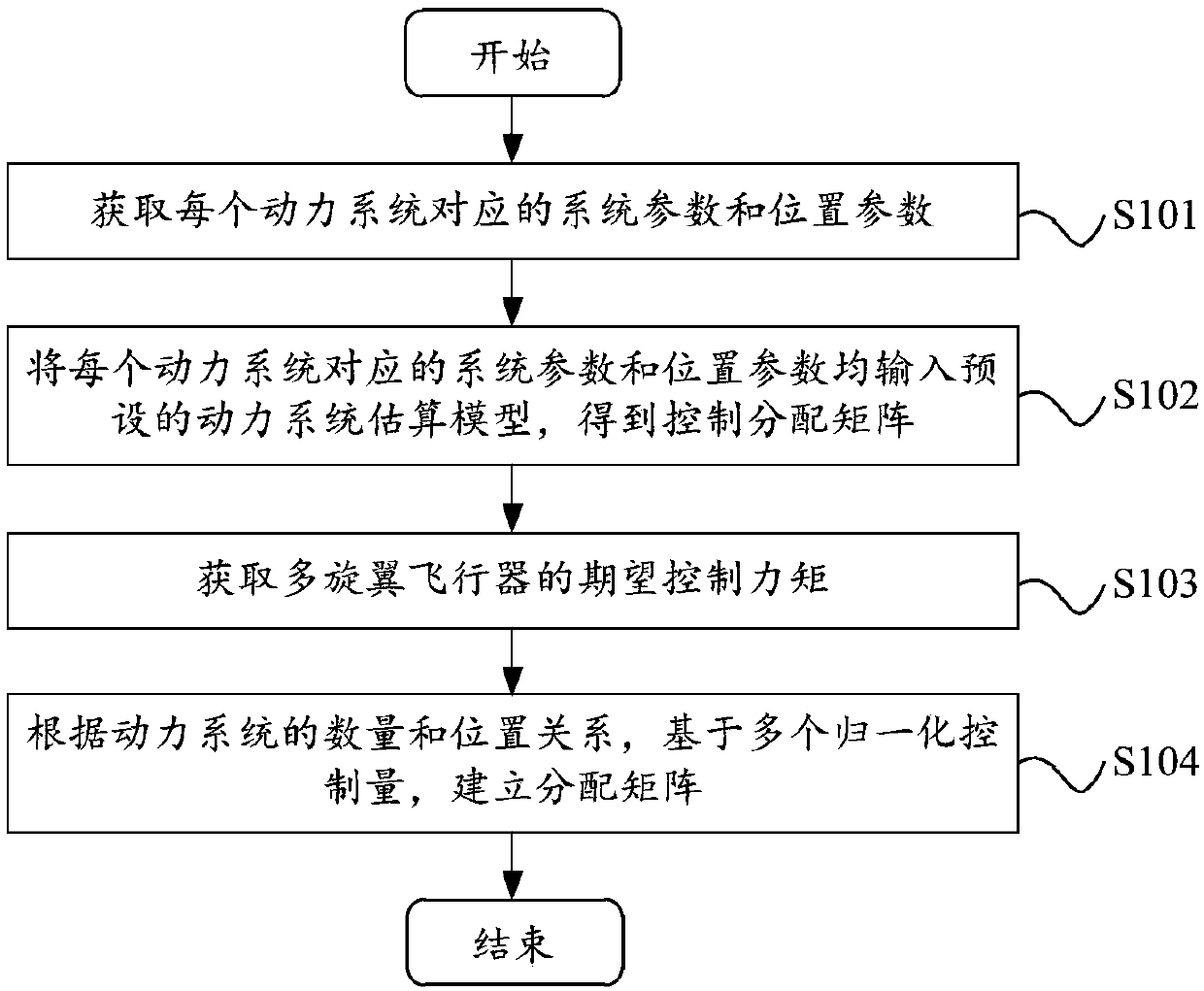
[0027] Please refer to figure 2 , figure 2 A flow chart of the multi-standard power system control allocation method provided by the first embodiment of the present invention is shown. The multi-specification power system control allocation method includes the following steps:
[0028] Step S101, obtaining system parameters and position parameters corresponding to each power system.
[0029] In the embodiment of the present invention, the system parameters corresponding to each power system may be parameters reflecting the characteristics of the power system, and the system parameters of the power system include a power system force data table and a first-order inertial time constant.
[0030]The powertrain force data table can indicate the ability of the power system to generate pulling force and rotational resistance torque. The direction of the rotational resistance torque is opposite to the propeller rotation direction of the power system. The power system force data t...
Embodiment approach
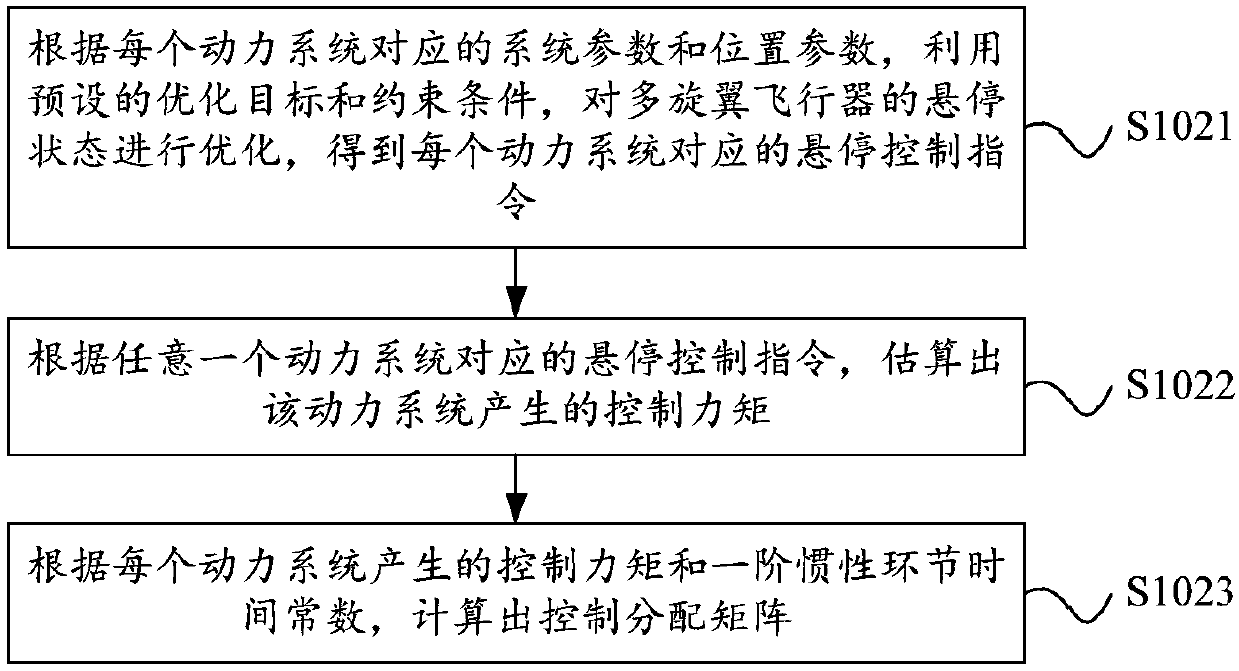
[0047] As an implementation, the control torque can be estimated using the following formula:
[0048] ΔT i =T i_hover_+10% -T i_hover
[0049] ΔL i =ΔT i ·L i_motor_Y
[0050] ΔM i =ΔT i · L i_motor_X
[0051] D. i =V i .A i / ω i
[0052] ΔD i =D i_hover_+10% -D i_hover
[0053] ΔN i =ΔD i
[0054] Among them, i_hover_+10% means that the positive direction of the hover control command representation corresponding to any power system increases by 10%, Δ represents the increment generated by the 10% increase in the positive direction of the hover control command representation, T i , L i , M i ,N i Respectively represent the tension, roll, pitch and yaw moments generated by a 10% increase in the positive direction of the hover control command corresponding to any power system.
[0055] It should be noted that i_hover_+10% is just an example, and users can flexibly choose between 5% and 30% according to needs in practical applications.
[0056] Sub-ste...
no. 2 example
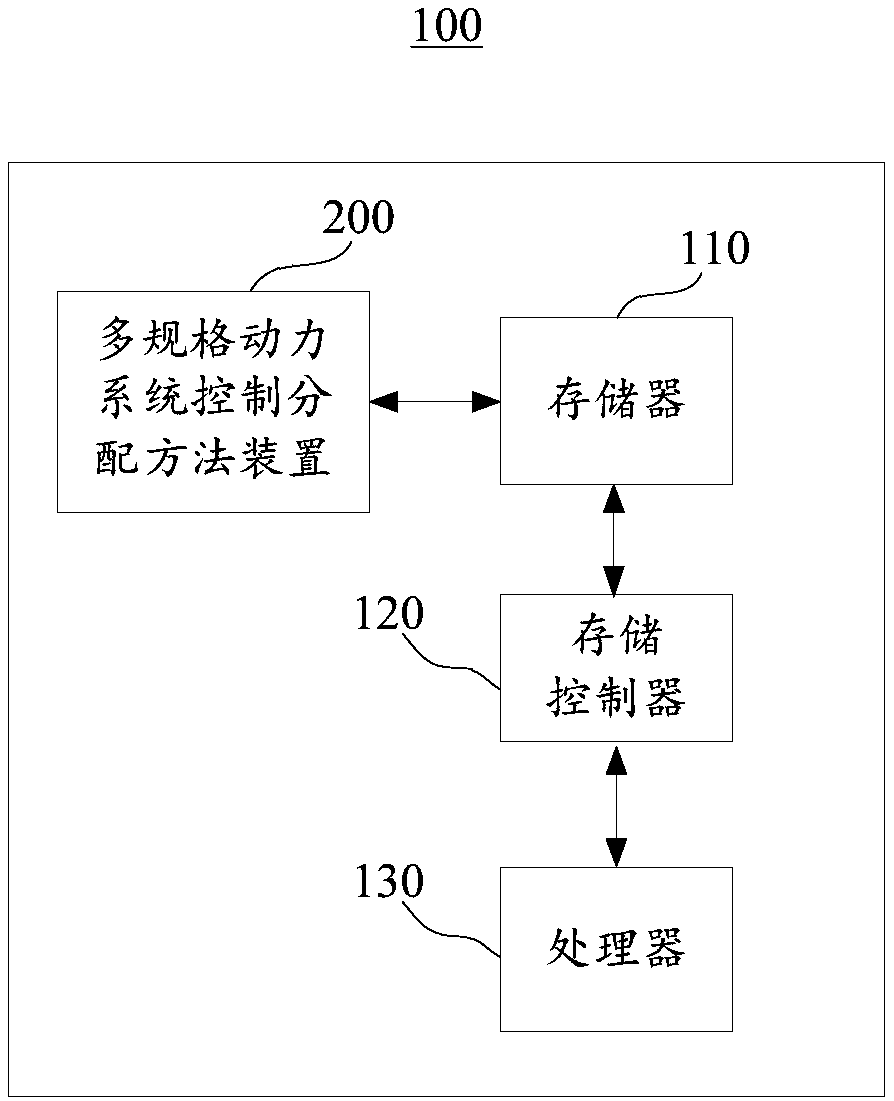
[0073] Please refer to Figure 5 , Figure 5 A schematic block diagram of the multi-standard power system control distribution device 200 provided by the second embodiment of the present invention is shown. The multi-standard power system control allocation device 200 includes a parameter acquisition module 210 , a control allocation matrix acquisition module 220 , an expected control torque acquisition module 230 and a control command acquisition module 240 .
[0074] The parameter acquisition module 210 is configured to acquire system parameters and position parameters corresponding to each power system.
[0075] In the embodiment of the present invention, the parameter acquiring module 210 may be used to execute step S101.
[0076] The control allocation matrix obtaining module 220 is configured to input the system parameters and position parameters corresponding to each power system into the preset power system estimation model to obtain the control allocation matrix.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More