

A Preset Performance Control Method for Uncertain Underactuated Unmanned Vehicle System
A technology of preset performance and control method, which is applied in the field of trajectory tracking control of unmanned boats, and can solve problems such as difficulty in obtaining mathematical models and difficulties in accurate modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
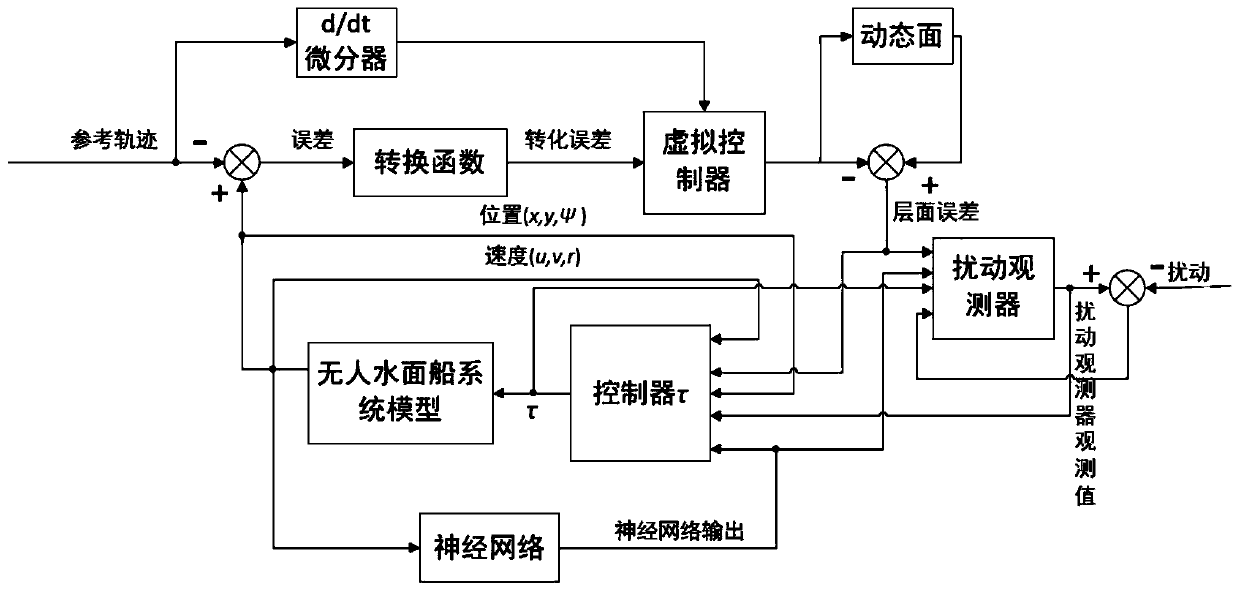
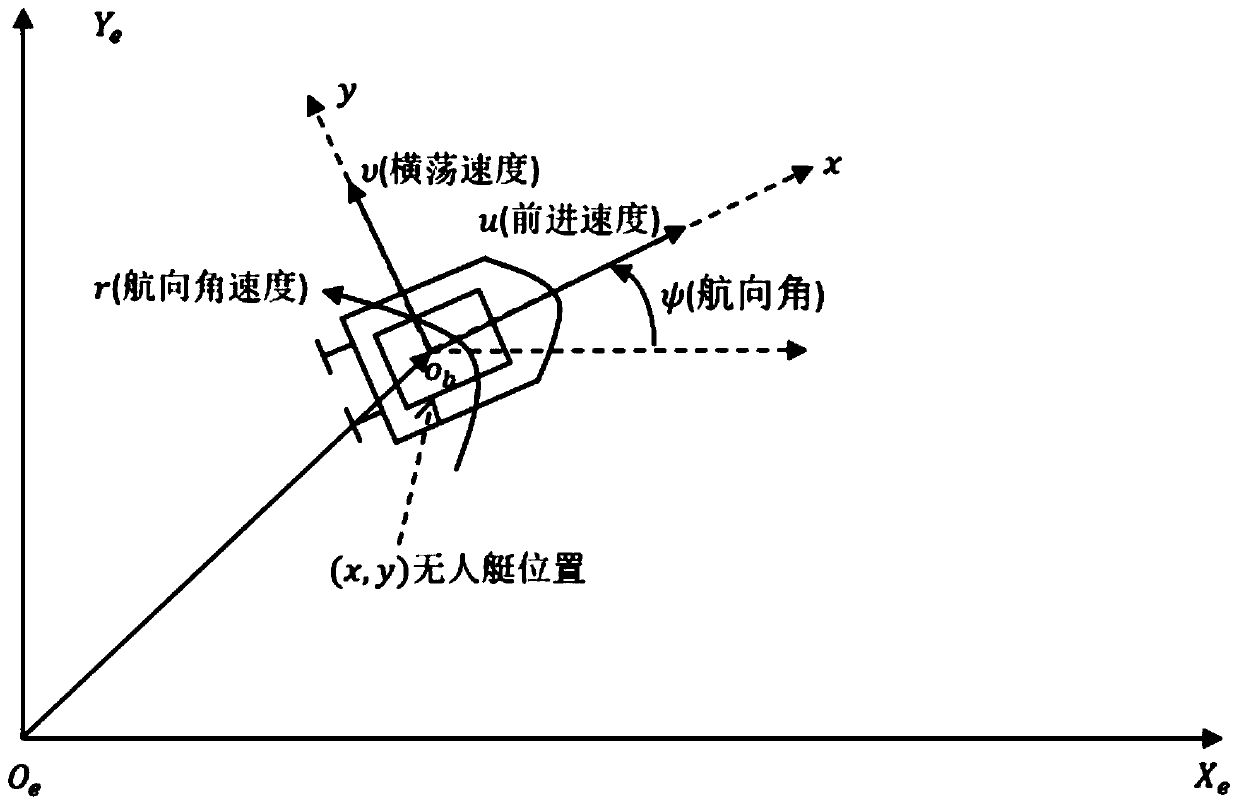
[0081] In the trajectory tracking control of the underactuated unmanned vehicle, considering the situation that the system model has uncertain dynamics, the structural diagram of the unmanned vehicle is as follows figure 1 As shown, the structural block diagram of the trajectory tracking control system of the unmanned vehicle is shown in figure 2 As shown, a preset performance control method for an uncertain underactuated unmanned vehicle system, its detailed implementation process includes:
[0082]Step 1), establishing the dynamic model of the unmanned boat, including the kinematics and dynamics model of the unmanned boat:
[0083] The dynamic model of the UAV is:
[0084]
[0085] Among them, (x, y) is the position of the UAV, ψ is the heading angle, u is the longitudinal velocity, v is the sway velocity of the UAV, r is the angular velocity of the heading, (τ u ,τ r ) is the control input of UAV, (τ wu ,τ wv ,τ wr ) is the external time-varying disturbance, (f u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More