

RGB-D feature matching-based 3D point cloud registration and fusion method
An RGB-D, feature matching technology, applied in image data processing, instruments, computing, etc., can solve problems such as inability to obtain 3D point cloud data at one time, and registration algorithm degradation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] In the drawings, the same or similar reference numerals are used to denote the same or similar elements or elements having the same or similar functions. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
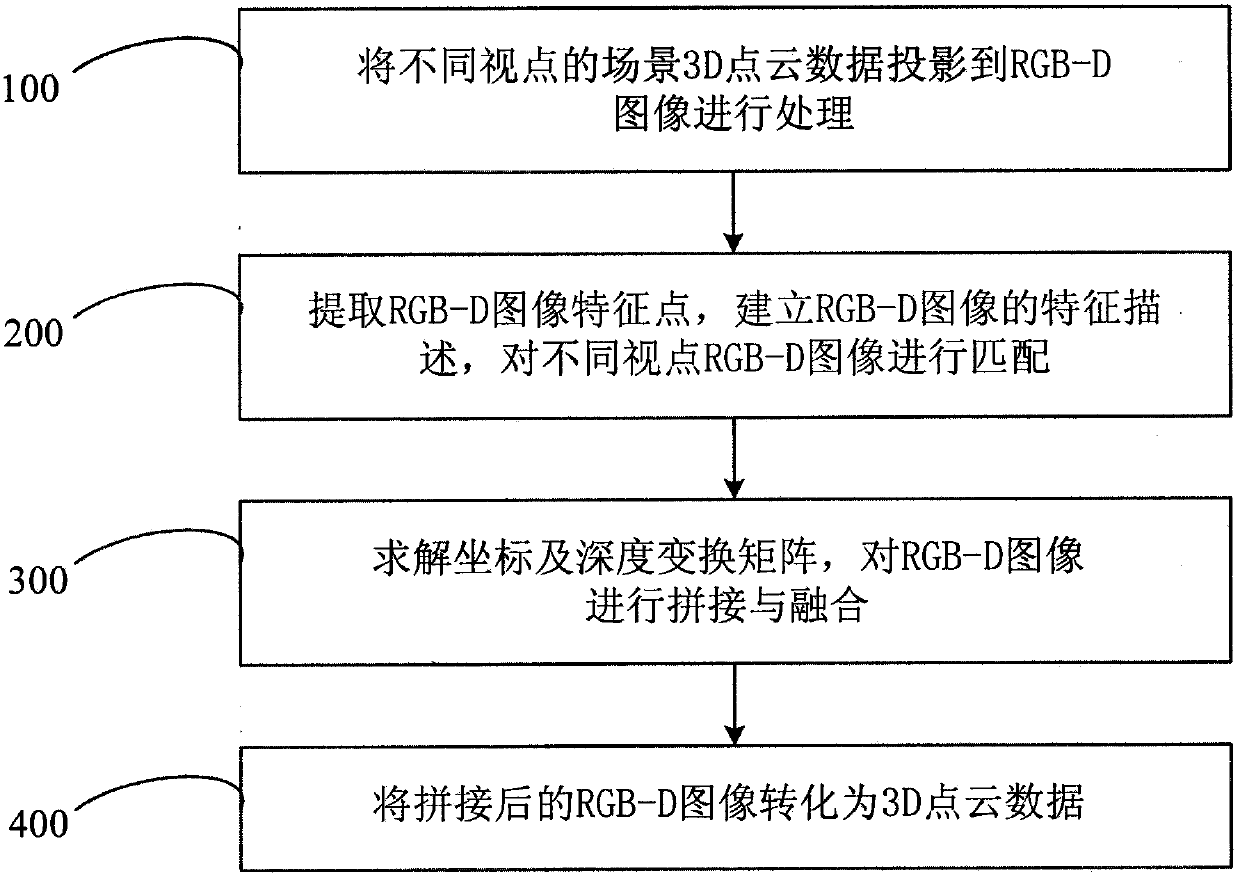
[0079] The flow chart of the 3D point cloud splicing and fusion method based on RGB-D feature matching provided in this embodiment is as follows figure 1 shown, including:
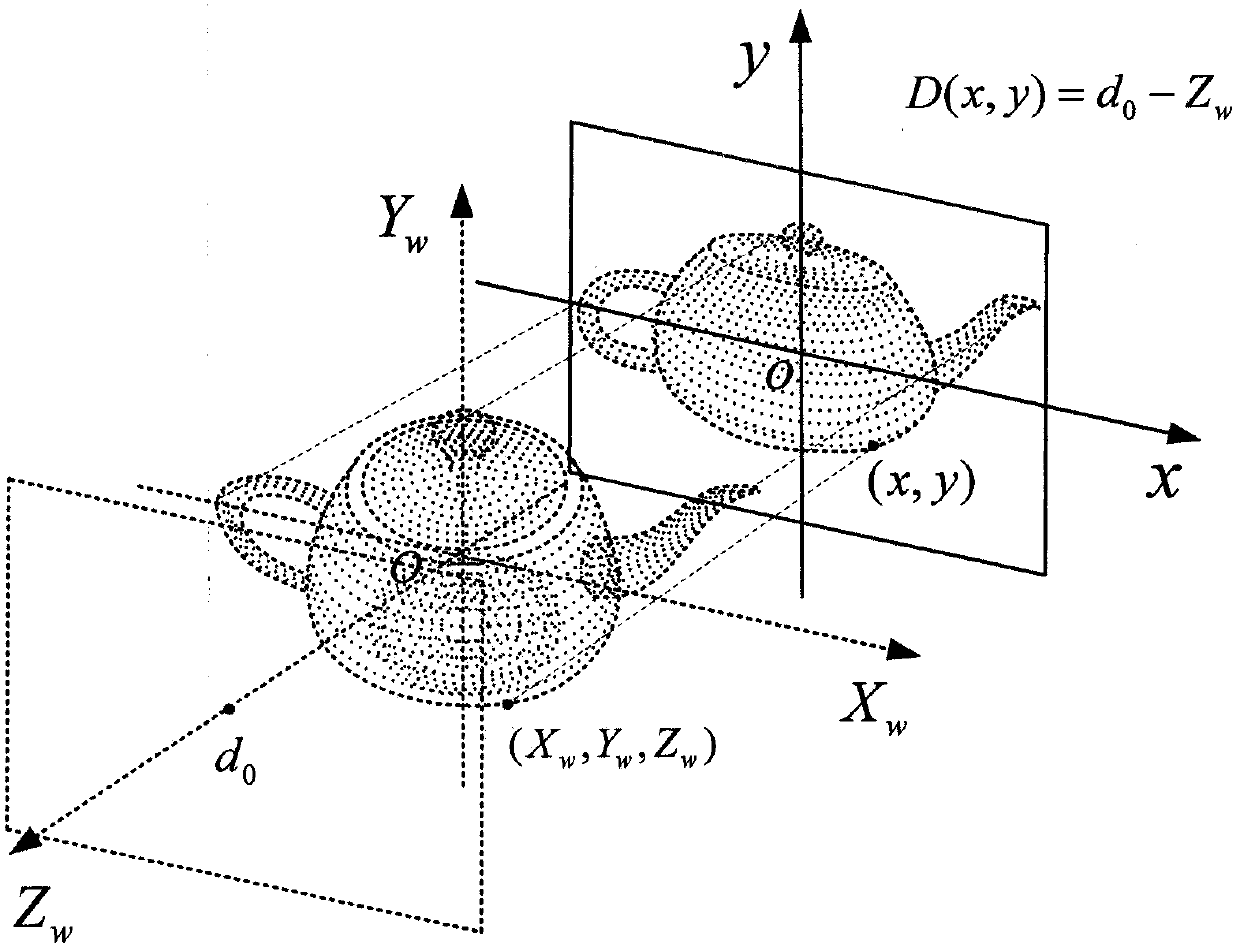
[0080] Step 100, projecting the 3D point cloud data of the scene surface from different viewpoints to the RGB-D image for processing, so as to realize the dimensionality reduction calculation of the 3D point cloud down to 2D;
[0081] Step 200, extracting feature points in the RGB-D image, establishing a feature description of the RGB-D image, and matching RGB-D images from different viewpoints;
[0082] Step 300, solving the coordinate and depth transformation matrix, and stitching and fusing the RGB-D images;
[0083] Step 40...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More