

Passive multi-station multi-target direction-finding cross location method based on angle information
A direction finding intersection and positioning method technology, which is applied in the field of passive multi-station multi-target direction finding cross positioning, can solve the problems of less research on clustering algorithms, eliminating false intersections, false targets, etc., and achieves good results and simple methods. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0043] This example uses matlab to verify the above-mentioned passive multi-station multi-target direction-finding cross-location algorithm scheme. For the sake of simplicity, the following assumptions are made on the algorithm model:
[0044] 1. All observation stations and targets are in the XY plane;
[0045] 2. All observation stations have the same direction finding accuracy;
[0046] 3. All engineering errors are added to the direction finding error;
[0047] 4. Assume that the target is stationary or moving at a very low speed;
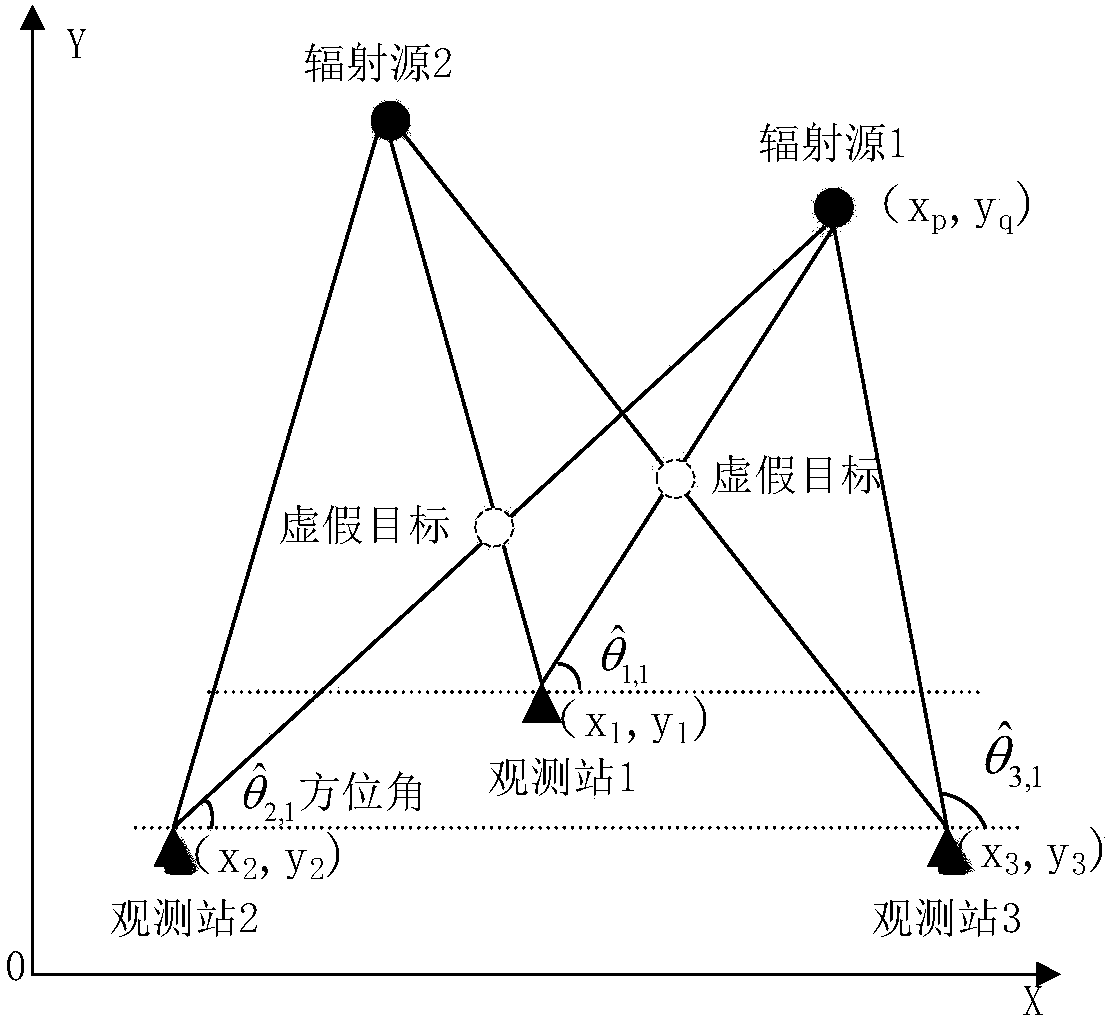
[0048] Let the target area be a square area of 200km×200km, and distribute 6 radiation sources, the coordinates are: (135,148.8), (173,191), (74.01,193.99), (84,131), (23,126.9), (119,59.71), unit for km. Use 3 fixed observation stations to locate the above targets. The coordinates of the 3 observation stations are (10,10), (100,30), (190,10), the unit is km, and the angle measurement error of the observation stations obeys the mean value ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More