Early-warning device used for unmanned aerial vehicle
An early warning device, a technology of unmanned aerial vehicles, applied in the field of unmanned aerial vehicles, can solve the problems of inability to adjust the unmanned aerial vehicle, poor practicability, inconvenient use, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
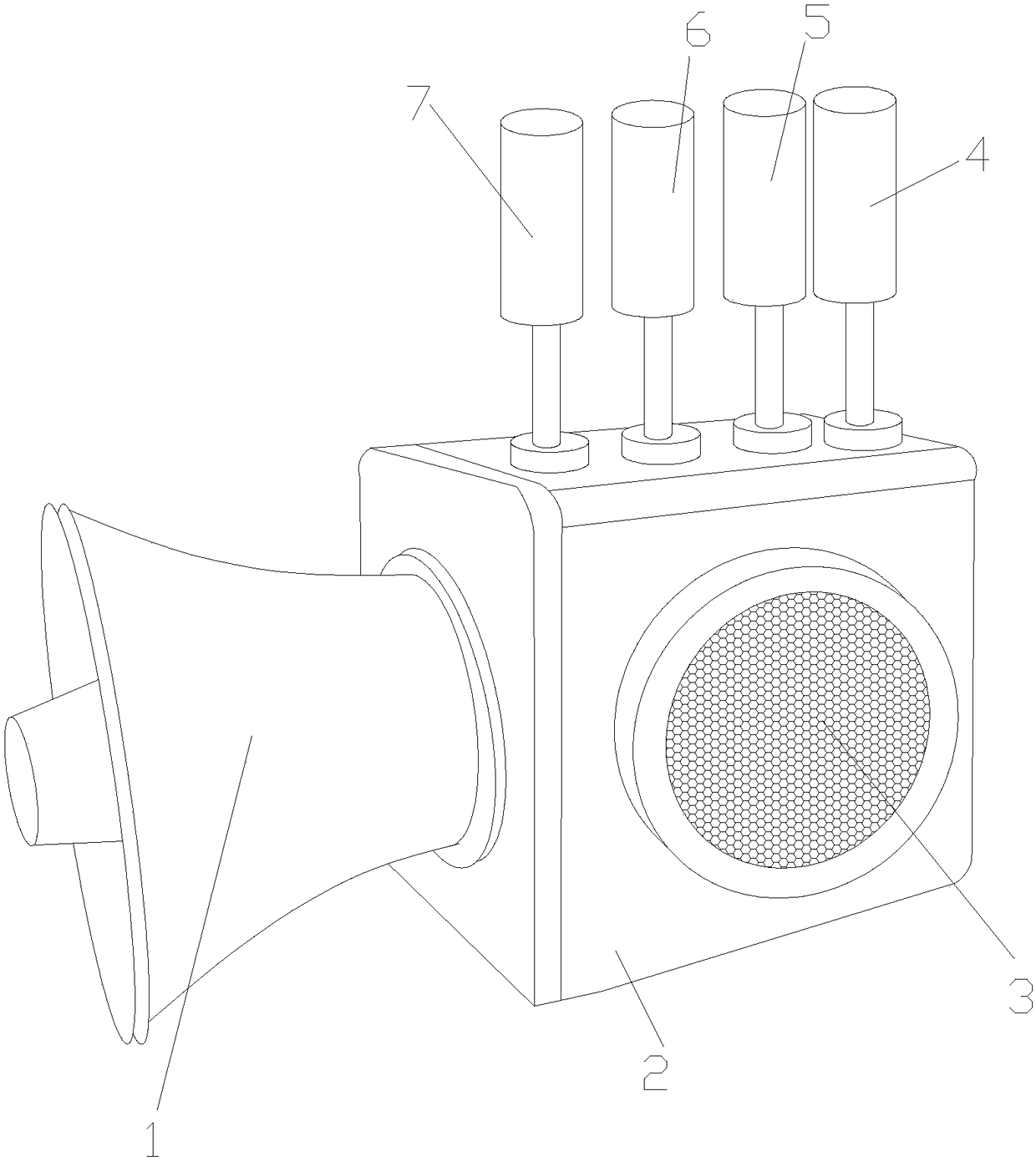
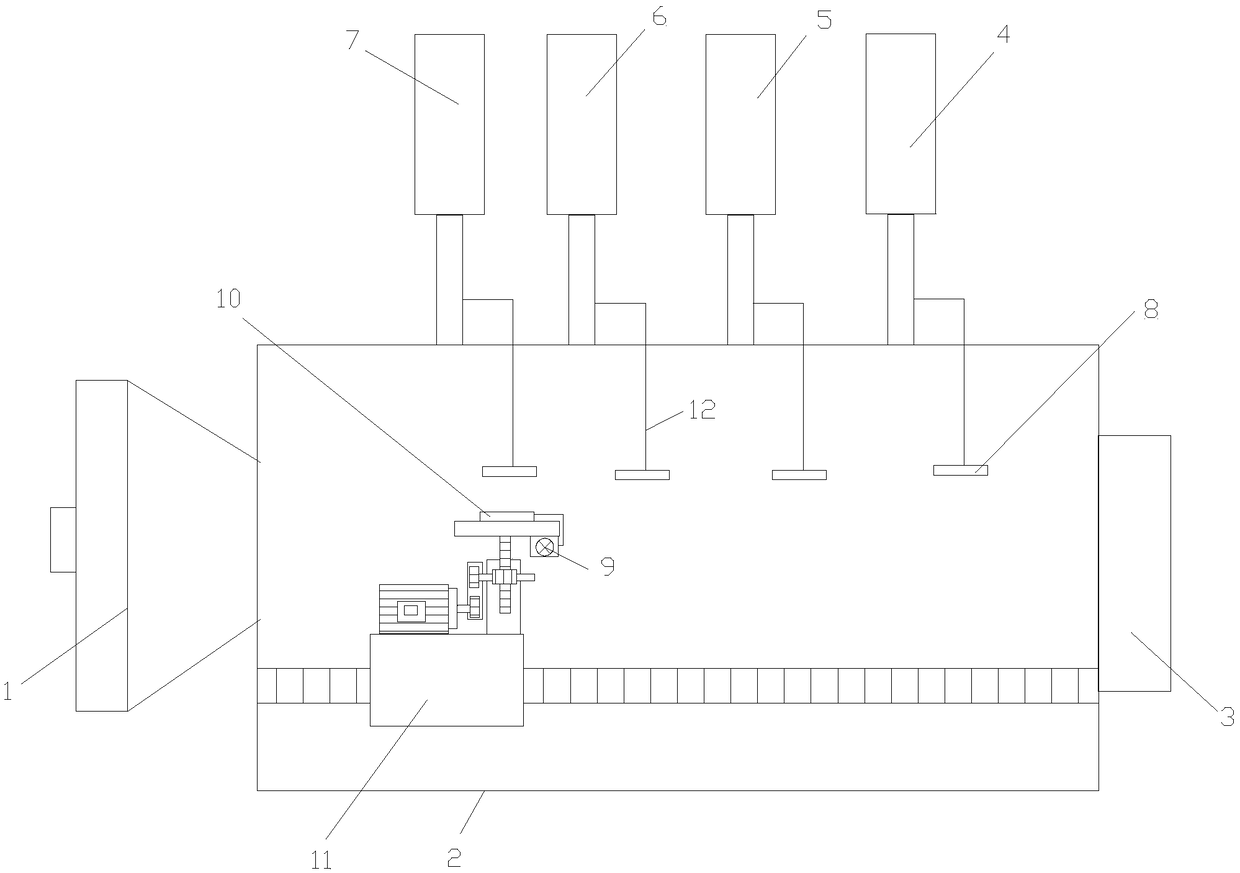
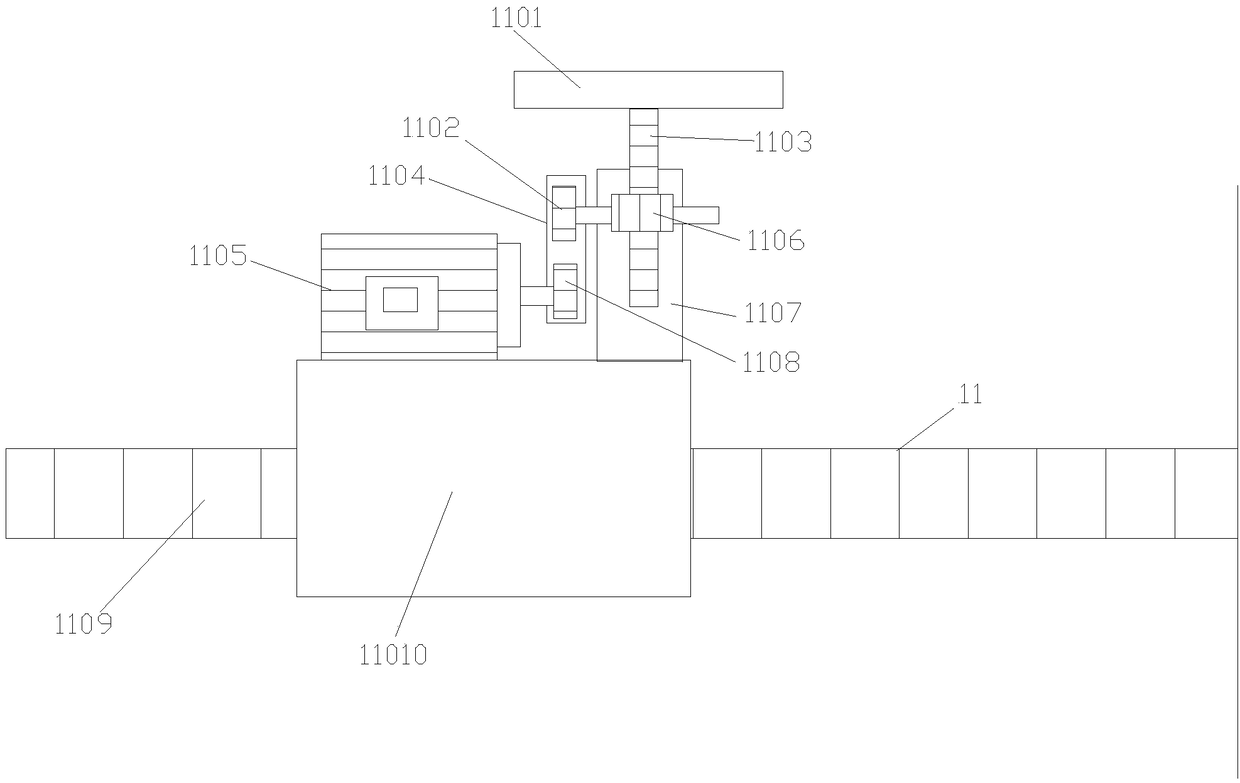
[0020] see Figure 1-Figure 3 , the present invention provides a technical solution for an early warning device for an unmanned aerial vehicle: an early warning device for an unmanned aerial vehicle, the structure of which includes an early warning horn 1, an early warning device housing 2, a signal collector 3, and a speed alarm 4 , altitude alarm 5, wind speed alarm 6, humidity alarm 7, power supply negative contact 8, power control box 9, power supply positive contact 10, signal alarm control mechanism 11, power supply connection line 12, the warning horn 1 Connected to one end of the early warning device housing 2, the front end surface of the early warning device housing 2 is embedded with a signal collector 3, and the speed alarm 4 is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



