

Robot vision system and method based on new vision
A technology of robot vision and vision system, applied in the field of robot vision system based on new vision, can solve problems such as low fruit recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
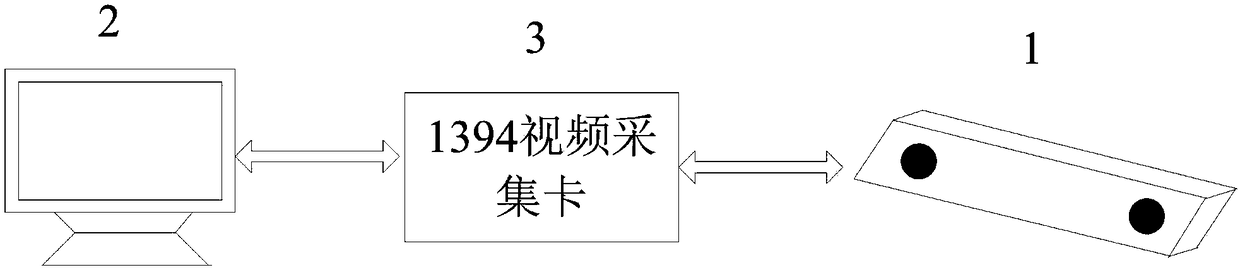
[0022] Such as figure 1 As shown, a kind of robot vision system and method based on new vision of the present invention is characterized in that, described vision system adopts Bumblebee binocular stereo vision system, specifically comprises: CCD binocular camera 1, PC machine 2 and 1394 video acquisitions Card 3. in:
[0023] The CCD binocular camera 1 is connected to the 1394 video capture card 3, and the image signal acquired by the camera is transmitted to the 1394 video capture card 3. The 1394 video capture card 3 is connected to the PC 2, and transmits the image signal to the PC 2 for further image processing.
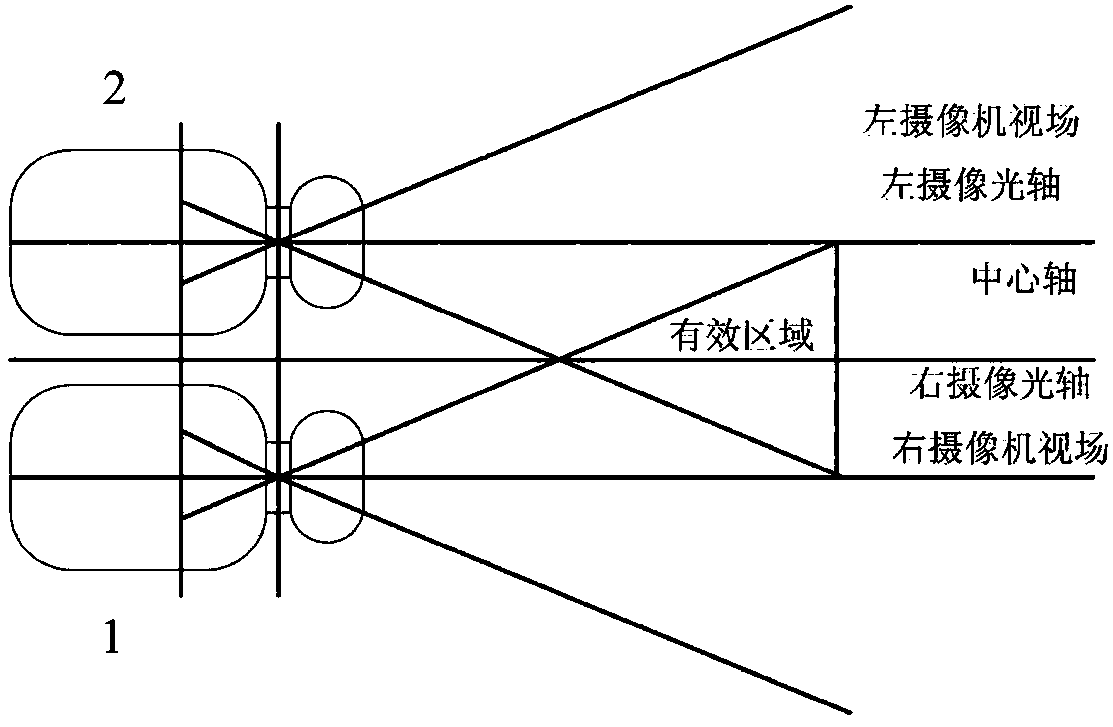
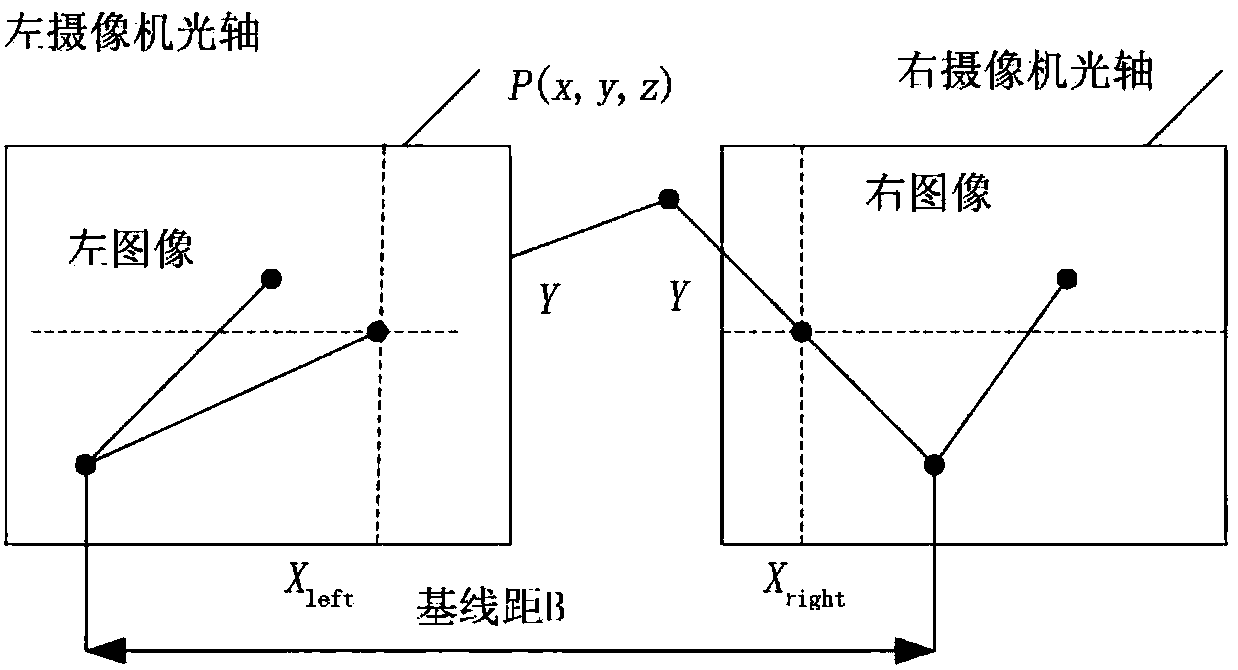
[0024] Such as figure 2 , 3 As shown, the Bum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More