

A Dense Map Creation Method Based on G2O and Random Fern Algorithm
A technology for random ferns and map creation, applied in computing, image analysis, mapping and navigation, etc., can solve problems such as accumulation and inability to build a globally consistent map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
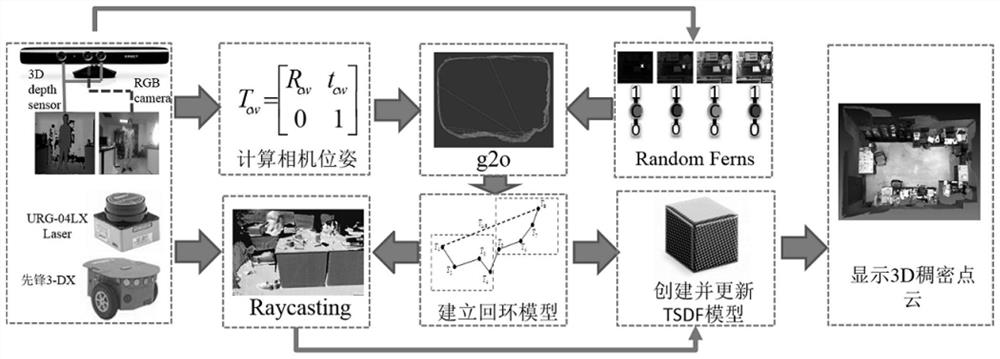
[0036] The invention is based on a Kinect sensor, collects data of the experimental environment through a map creation algorithm, and obtains corresponding depth maps and color maps. Optimize the depth map and calculate the rotation and translation matrix from the collected data information to create a camera pose model. The observation state with the smallest error is obtained by constructing the iterative function of g2o, using the GPU to process the ICP matching projection algorithm in parallel, constructing a model-to-model matching strategy, and using random ferns for closed-loop matching. Establish a TSDF model to represent the surface of a three-dimensional object and perform multi-frame fusion. The overall flow of the method involved is attached figure 1 As shown, the specific implementation process is divided into the following steps...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More