

Method for creating semi-dense cognitive map for binocular SLAM (simultaneous localization and mapping)
A cognitive map and binocular technology, applied in the field of visual SLAM and map creation, and mobile robots, can solve problems such as inability to use mobile robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
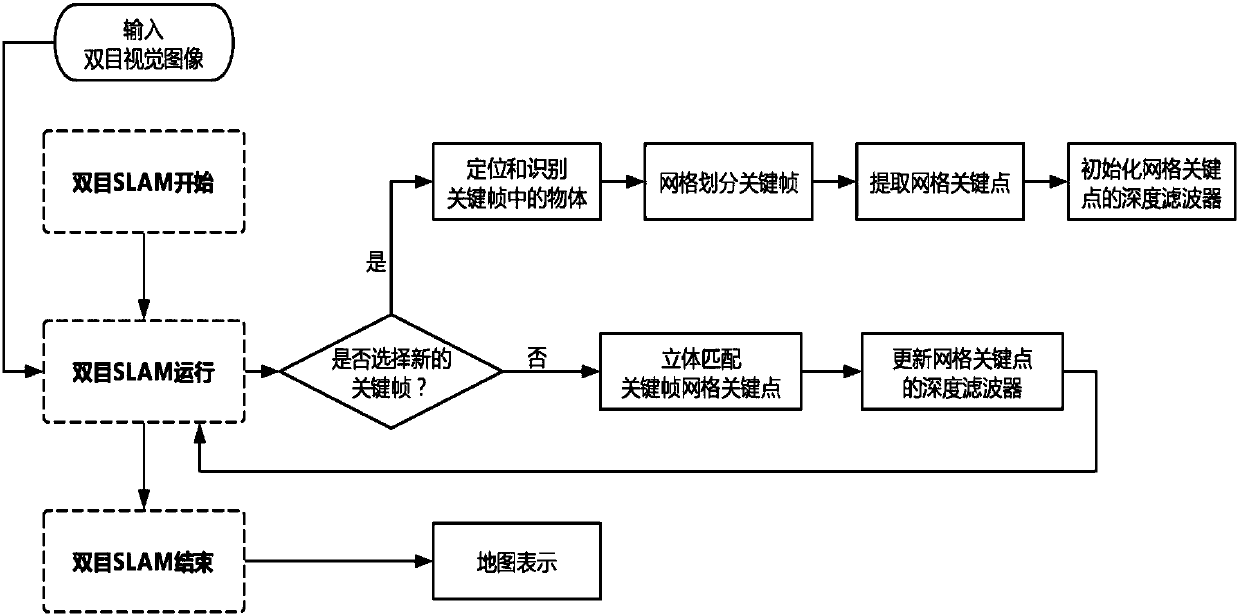
[0076] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
[0077] see figure 1 As shown, the method for creating a semi-dense cognitive map for binocular SLAM provided in this embodiment includes the following steps:
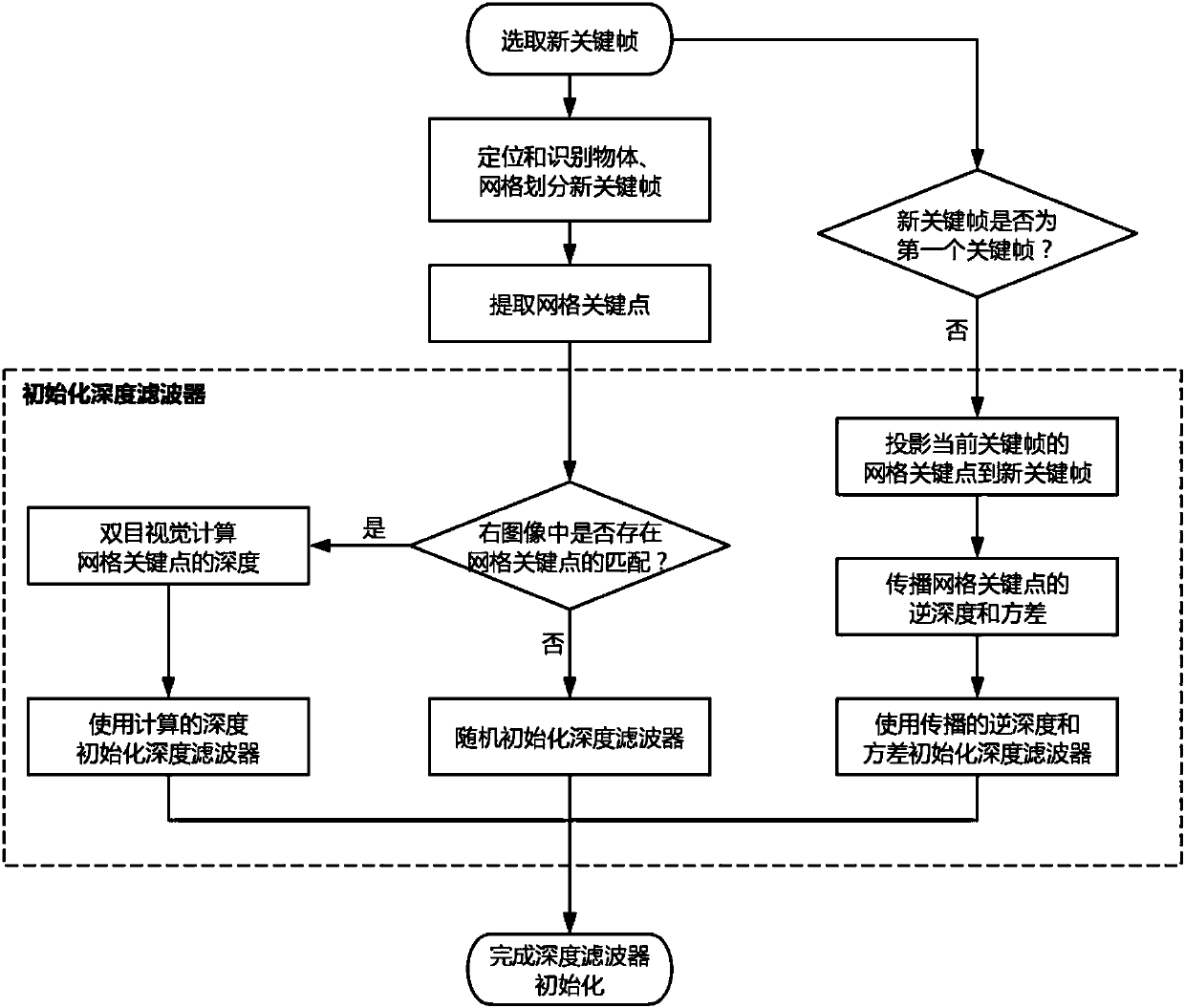
[0078] 1) Locate and identify the object of interest in the key frame, search the location area of the object in the image and obtain the category of the object. The positioning and recognition algorithm of the object of interest adopts the Single Shot MultiBox Detector algorithm. By customizing the training data set, the user can only search for objects that the user is interested in. For object categories, SDS-Mapping uses index tables for storage.
[0079] 2) According to the resolution of the binocular vision image, select a grid of appropriate size to divide the key frame, and further subdivide the grid ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More