

A method of robot spraying trajectory generation based on ros platform
A trajectory generation, robot technology, applied in the direction of instruments, simulators, computer control, etc., can solve the problem of low degree of automation, achieve the effect of less manual participation, easy modification, and lower R&D costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
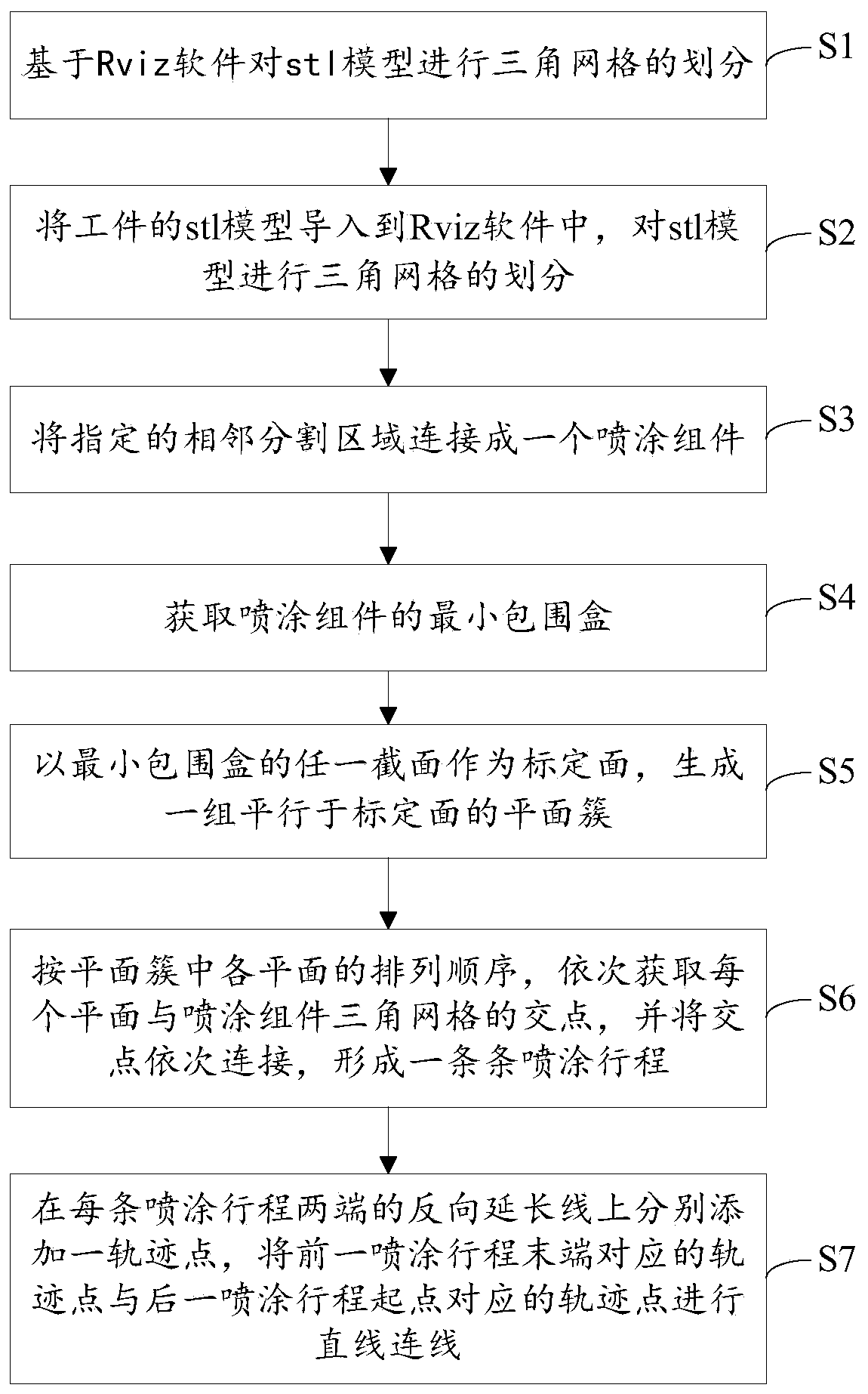
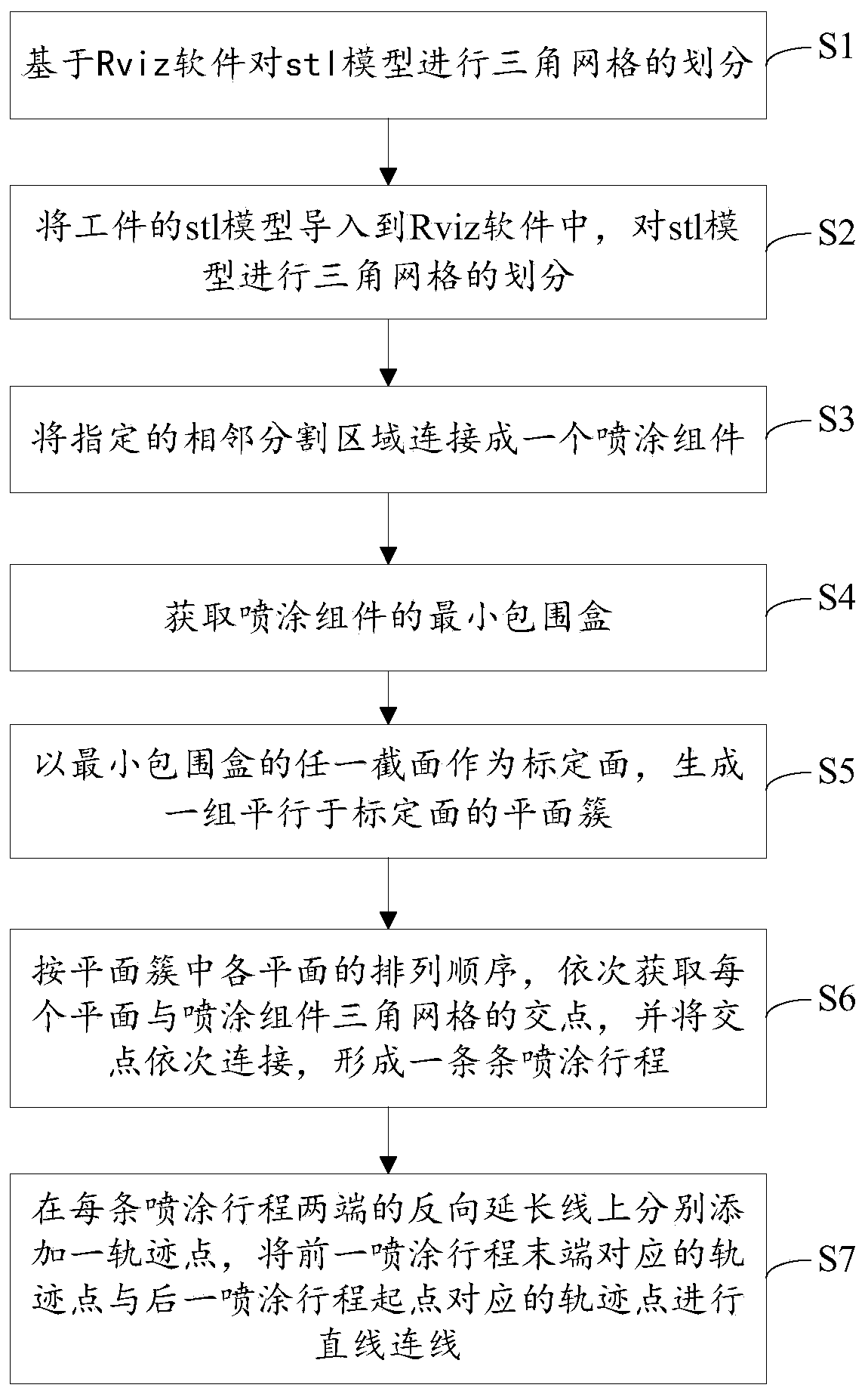
[0054] figure 1 The flowchart of the method for generating the robot spraying trajectory based on the ROS platform provided by the embodiment of the present invention, the method includes the following steps:
[0055] S1, import the stl model of the workpiece into the Rviz software, read the triangular mesh information in the stl model, and the triangular mesh information includes vertex coordinates and corresponding normal vectors;
[0056] S2. Segment the stl model into n regions based on the continuity between the triangle faces;
[0057] Since the stl model cannot extract the edge and surface...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More