

A 3D model-based method for robot spraying trajectory generation
A technology for generating 3D models and trajectories, applied to instruments, program control, electrical program control, etc., can solve problems such as low degree of automation, achieve less manual participation, high degree of automation, and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
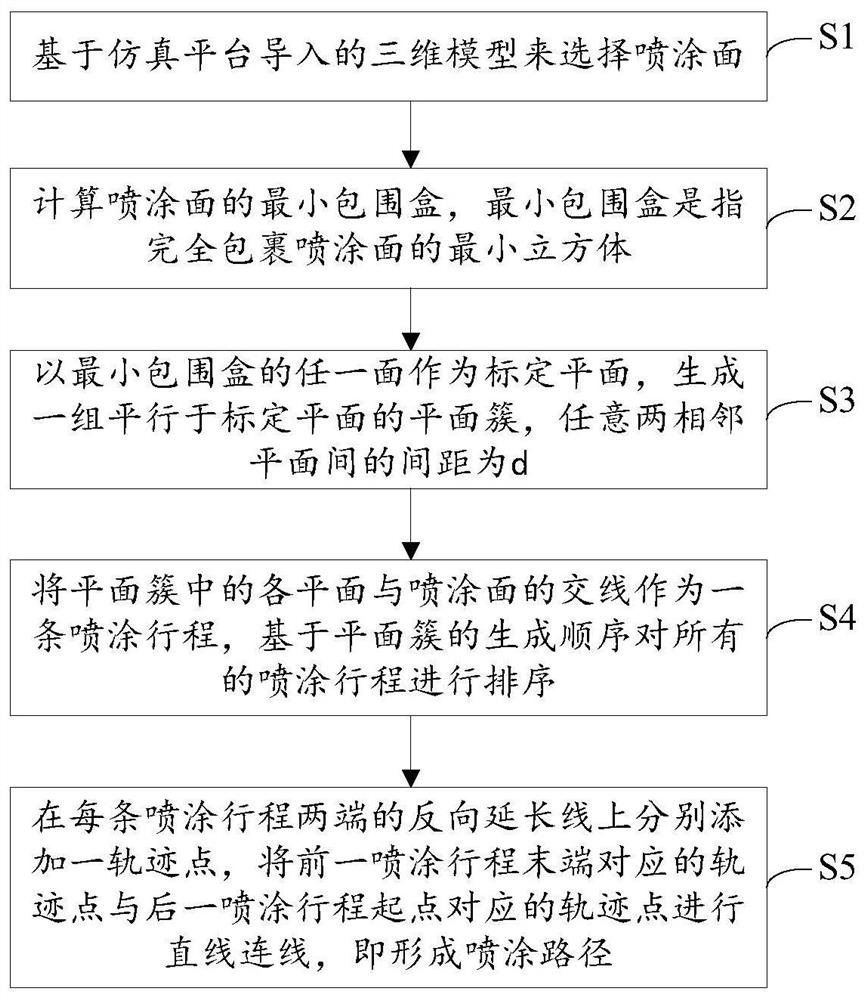
[0059] figure 1 A flow chart of a method for generating a robot spraying trajectory based on a three-dimensional model provided in an embodiment of the present invention, the method includes the following steps:
[0060] S1. Select the spraying surface based on the 3D model imported from the simulation platform;
[0061] In the embodiment of the present invention, the three-dimensional model is a model that can recognize the vertices, edges and surfaces of the model, such as the STEP model or the IGES model. If there are multiple sprayed surfaces selected, and the multiple sprayed surfaces are adj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More