

Hybrid mechanical leg and its control method
A mechanical leg and hybrid technology, applied in the field of robotics, can solve the problems that the mechanical leg is not flexible enough, can not accurately control the movement track of the mechanical leg, and achieve the effect of simple structure, reasonable design and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
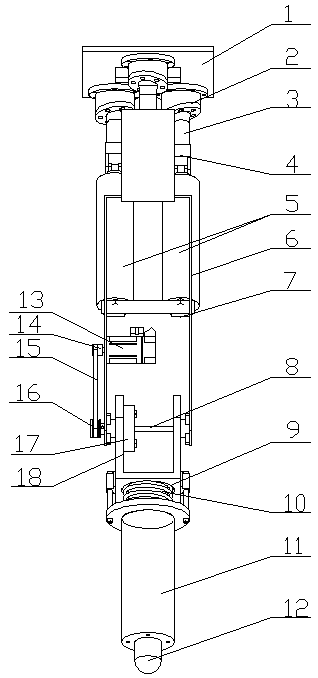
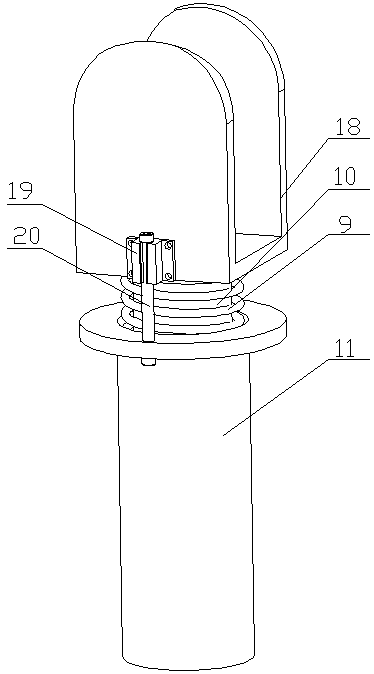
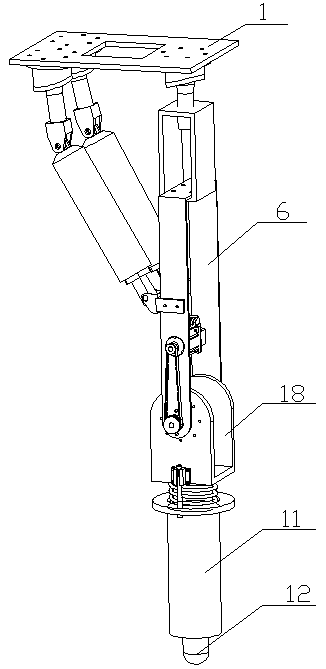
[0018] As shown in the figure, a hybrid mechanical leg includes a fixed top plate 1, a hip joint, a thigh, a knee joint 18, a lower leg 11, and a foot 12 connected sequentially from top to bottom. The hip joint includes 3 sets of ball joint assemblies, The ball joint assembly is composed of a ball joint seat 2, a ball joint 3 and a ball joint connector 4 connected in sequence, and the ball joint seat 2 is arranged at the bottom of the fixed top plate 1; the thigh is a parallel structure, including a thigh support frame 6 and 2 electric cylinders 5, the thigh support frame 6 is connected with one of the ball joints, the tops of the two electric cylinders 5 are respectively connected with the other two ball joints, the lower end of the electric cylinder 5 is connected to the thigh through the electric cylinder fixing frame 7 The support frame 6 is connected, and the expansion and contraction of the electric cylinder 5 drives the movement of the thigh support frame 6 to realize th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More