

VSLAM method based on multi-characteristic visual odometer and graph optimization model
A visual odometry and multi-feature technology, applied in 3D image processing, calculation, 3D modeling, etc., can solve problems such as large amount of calculation, cumulative error of robot pose, and low reliability of robot pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
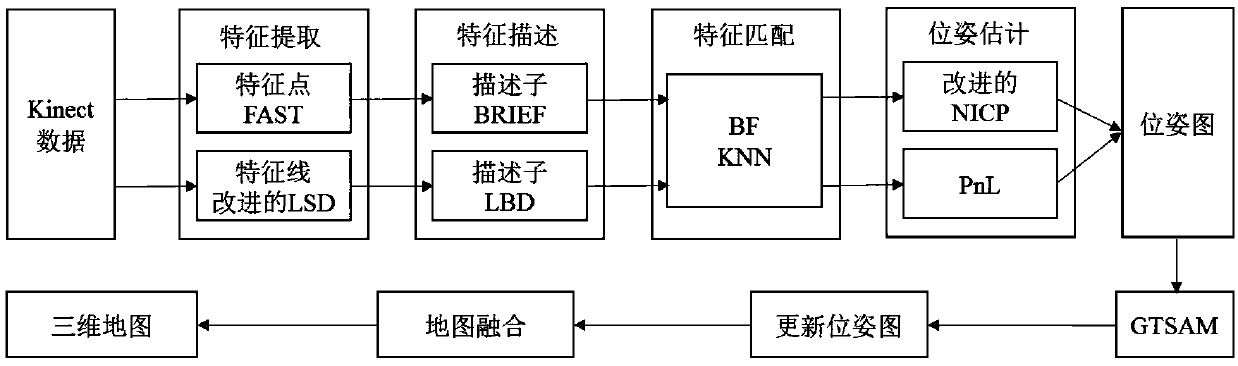
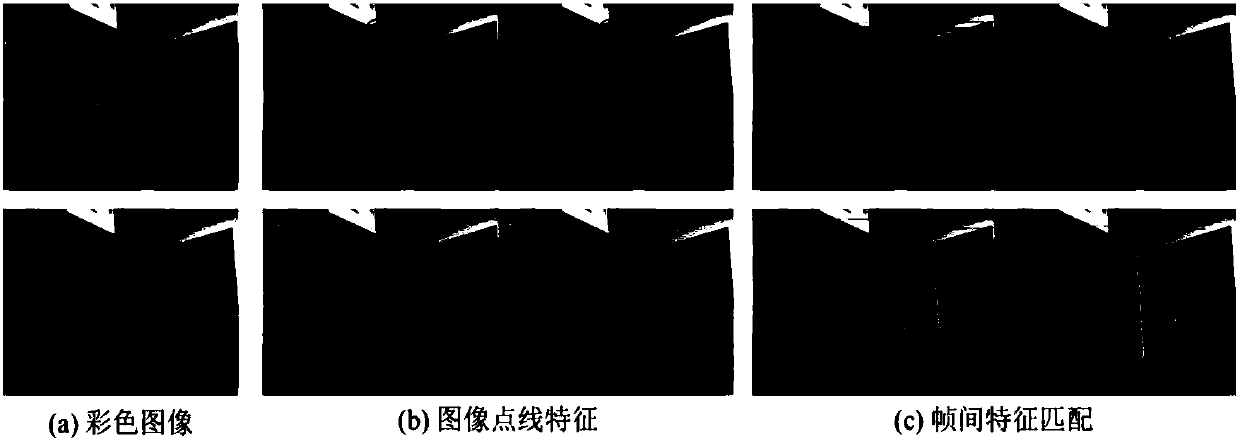
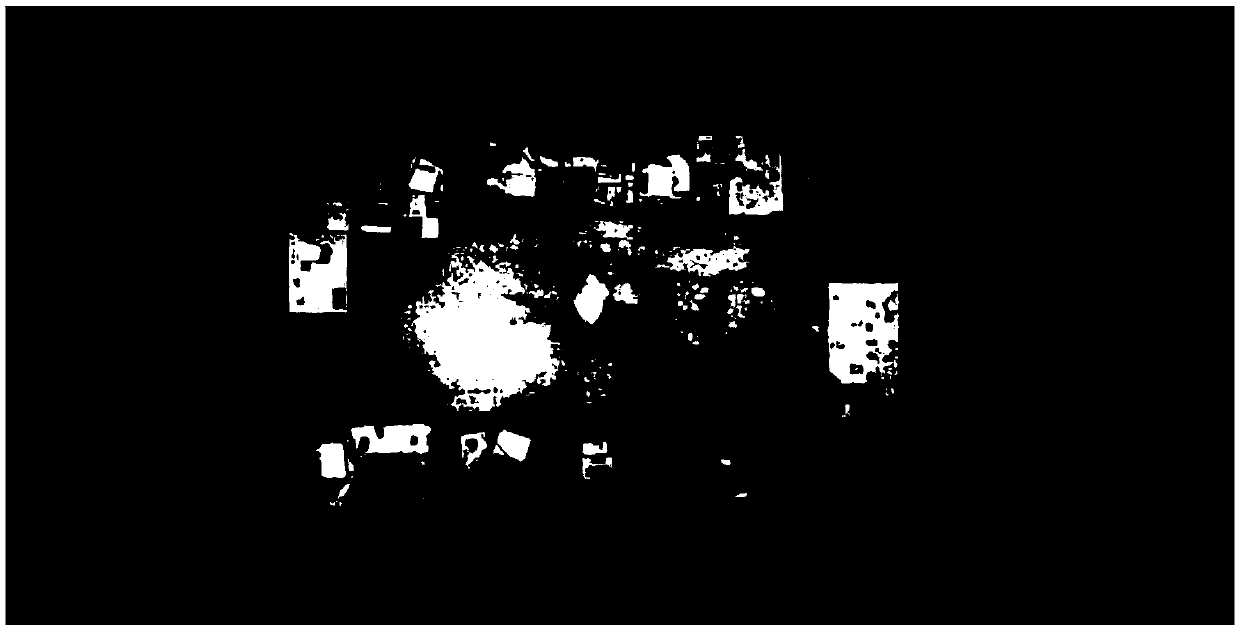
[0050] Aiming at the problems of lack of image point features and accumulation of estimated pose errors existing in the current VSLAM algorithm, the present invention proposes a VSLAM method based on a multi-feature visual odometer and a graph optimization model. This method first uses FAST and improved LSD algorithm to extract point and line features in color images, then uses different descriptors to describe features, then performs feature matching, and finally uses improved NICP and PnL algorithms to estimate the initial pose of the robot. Extracting line features in the image expands the application scenarios of the algorithm and obtains a better initial pose of the robot. Afterwards, the multi-feature visual odometry is expressed as a Bayesian network, and the factor graph is obtained on the basis of the Bayesian network, and then the glo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More