

Mobile robot path planning method based on improved A-star algorithm
A mobile robot and path planning technology, which is applied to instruments, road network navigators, measuring devices, etc., can solve the problems of large cumulative turning angles, many path points and broken lines, etc., and achieve the effect of reducing the path length and turning angle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
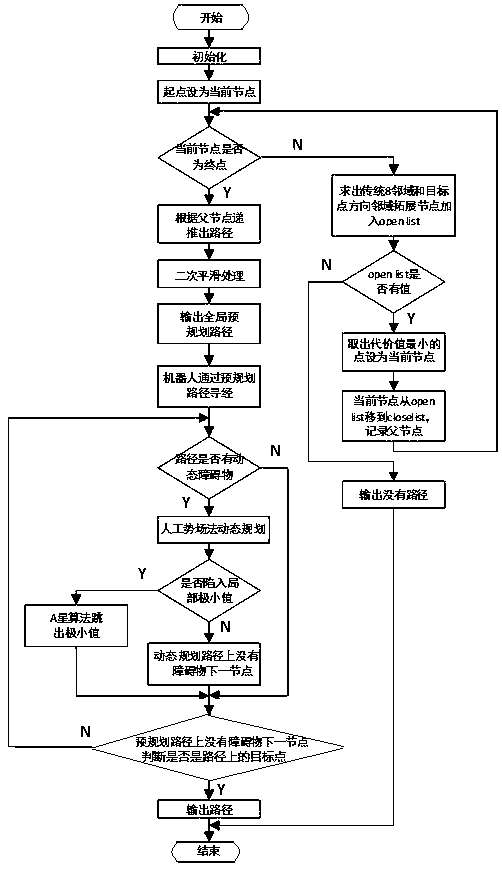
[0028] Embodiment 1: as Figure 1-5 As shown, a mobile robot path planning method based on the improved A-star algorithm, first performs global path pre-planning in a static obstacle environment; then performs secondary smoothing on the path points of the global path pre-planning to obtain the pre-planned path; Finally, the artificial potential field method and the global path pre-planning method in the static obstacle environment are used to perform local path planning when dynamic obstacles are encountered.
[0029] Further, the global path pre-planning in a static obstacle environment can be set as:
[0030] Step S1.1, first initialize: create an open list and a close list, the initial values of the pen list and the close list are both empty, the open list is used to save the generated but unused nodes, and the close list is used to save obstacles and used nodes the node; add the obstacle to the close list; set the starting point as the current node;
[0031] Step S1.2....
Embodiment 2
[0042] Embodiment 2: as Figure 1-5 Shown, a kind of mobile robot path planning method based on improved A star algorithm, the specific steps of described method are as follows:
[0043] Step 1: Global path pre-planning in a static obstacle environment:
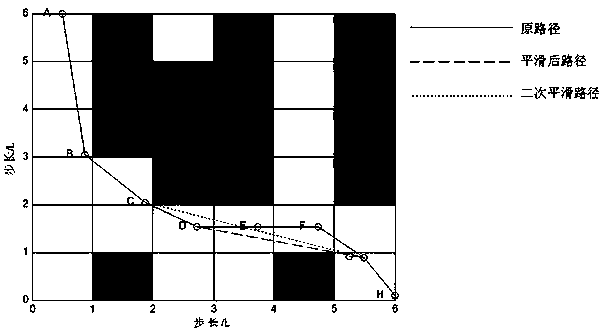
[0044] Step 1.1, first initialize: as image 3 As shown, build a 6×6 grid environment, black is the obstacle, white is the passable path, the starting point is point A in the grid, the target point is point H in the grid, create open list and close list, open list and close The initial value of the list is empty, the open list is used to save the generated but unused nodes, the close list is used to save obstacles and used nodes; add obstacles to the close list; set the starting point as the current node;
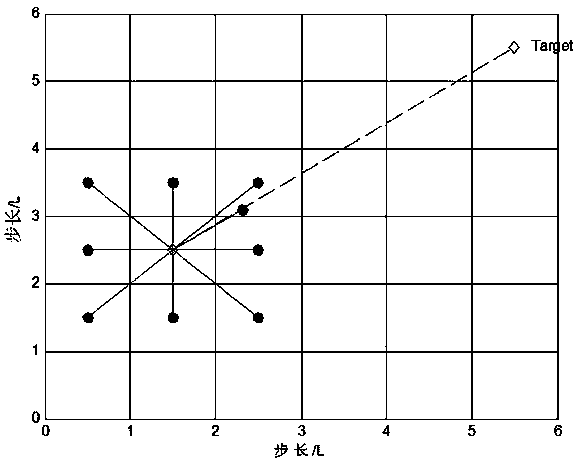
[0045] Step 1.2. Check whether the current node is the target point: if it is, the path will be deduced according to the parent node, and the path point will be output; if it is not the target point, the traditional A-st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More