

Multi-line laser radar and GPS-based three-dimensional road construction method
A multi-line laser, three-dimensional road technology, applied in 3D modeling, re-radiation of electromagnetic waves, radio wave measurement systems, etc. problem, to achieve the effect of clean 3D road map, high cost performance and small error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0025] The preferred embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
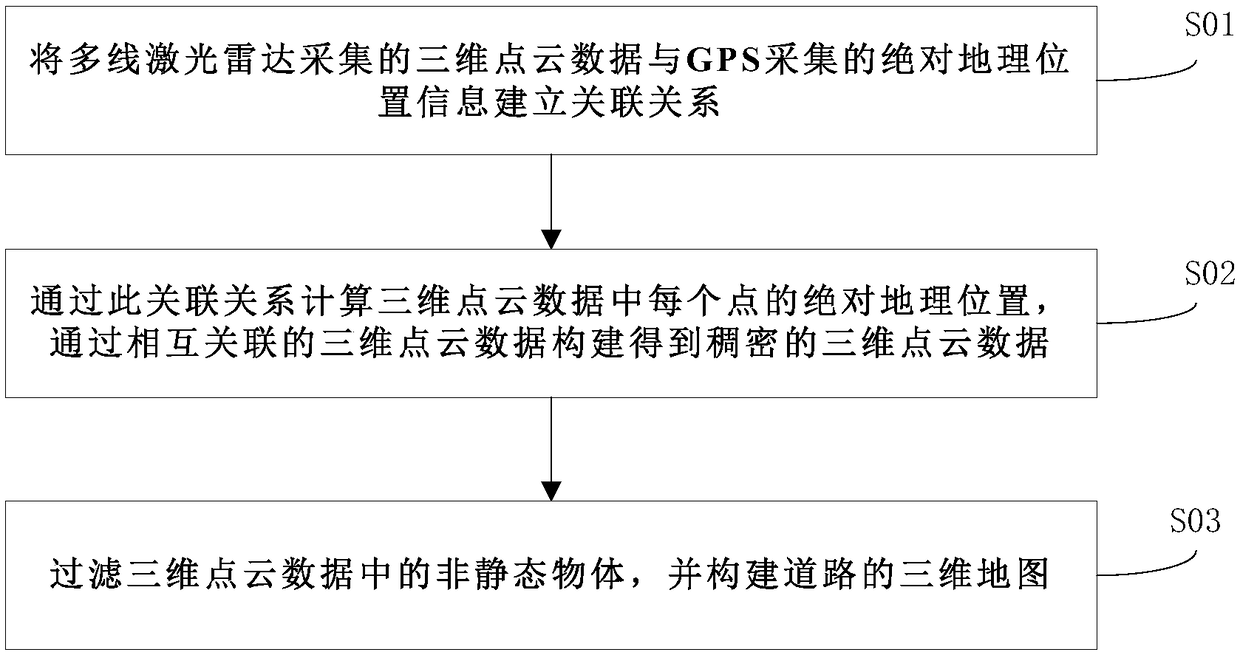
[0026] Such as figure 1 As shown, a 3D road construction method based on multi-line lidar and GPS includes the following steps:
[0027] S01: Establish a relationship between the 3D point cloud data collected by multi-line lidar and the absolute geographic location information collected by GPS; mainly the time and space relationship of 3D point cloud data.
[0028] S02: Calculate the absolute geographic location of each point in the 3D point cloud data through this relationship, and construct dense 3D point cloud data through the construction of interrelated 3D point cloud data;
[0029] S03: Filter non-static objects in 3D point cloud data and build a 3D map of the road.
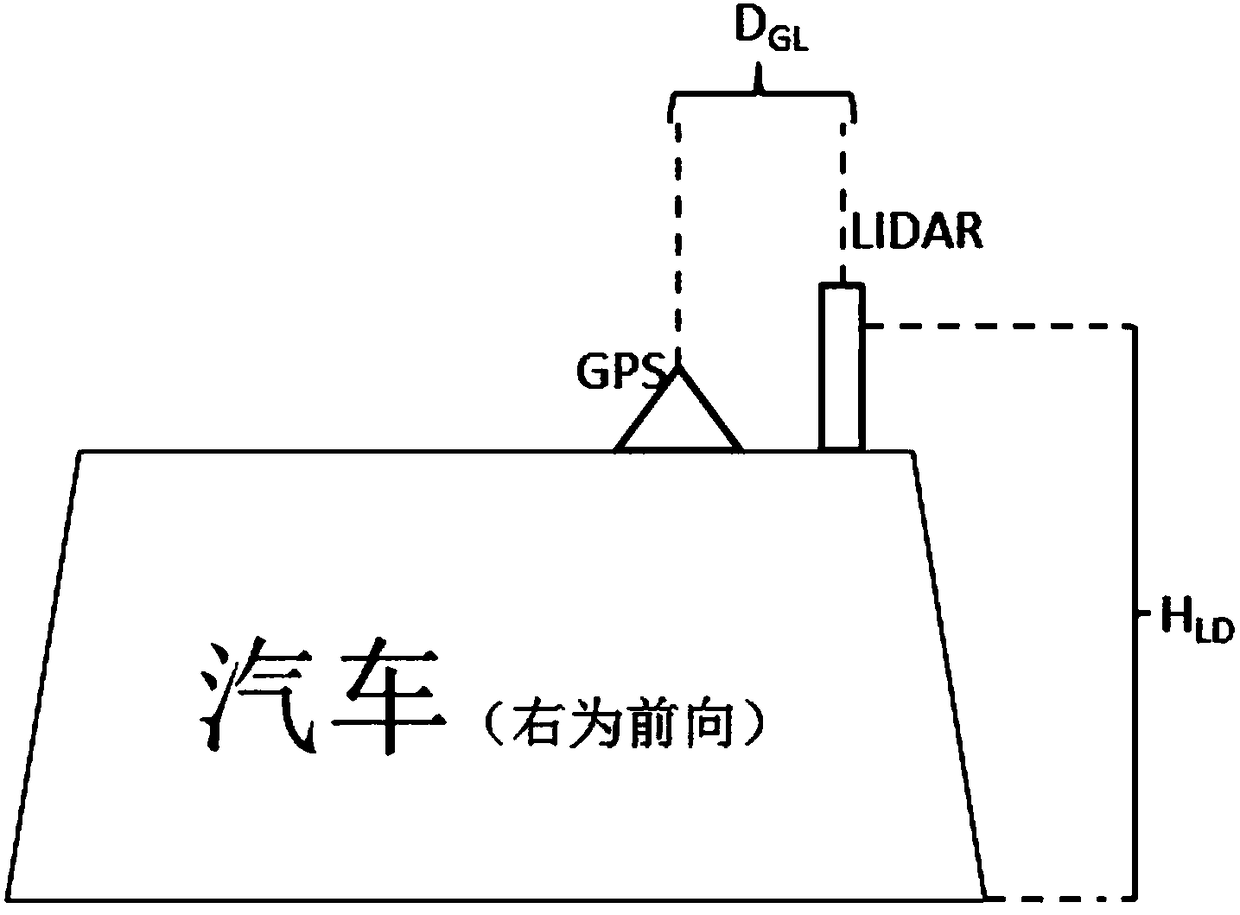
[0030] Such as figure 2 As shown, in the data collection stage, an adjustable multi-line lidar is installed. The lidar wiring harness should be more than 32 lines as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More