

Target recognition and tracking system for unmanned ship and working method thereof
A target recognition and tracking system technology, applied in the field of unmanned ships, can solve problems such as increasing work difficulty, increasing operating risks in the working environment, and single function of unmanned ships, improving efficiency, reducing false alarm image areas, and having autonomy. The effect of judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
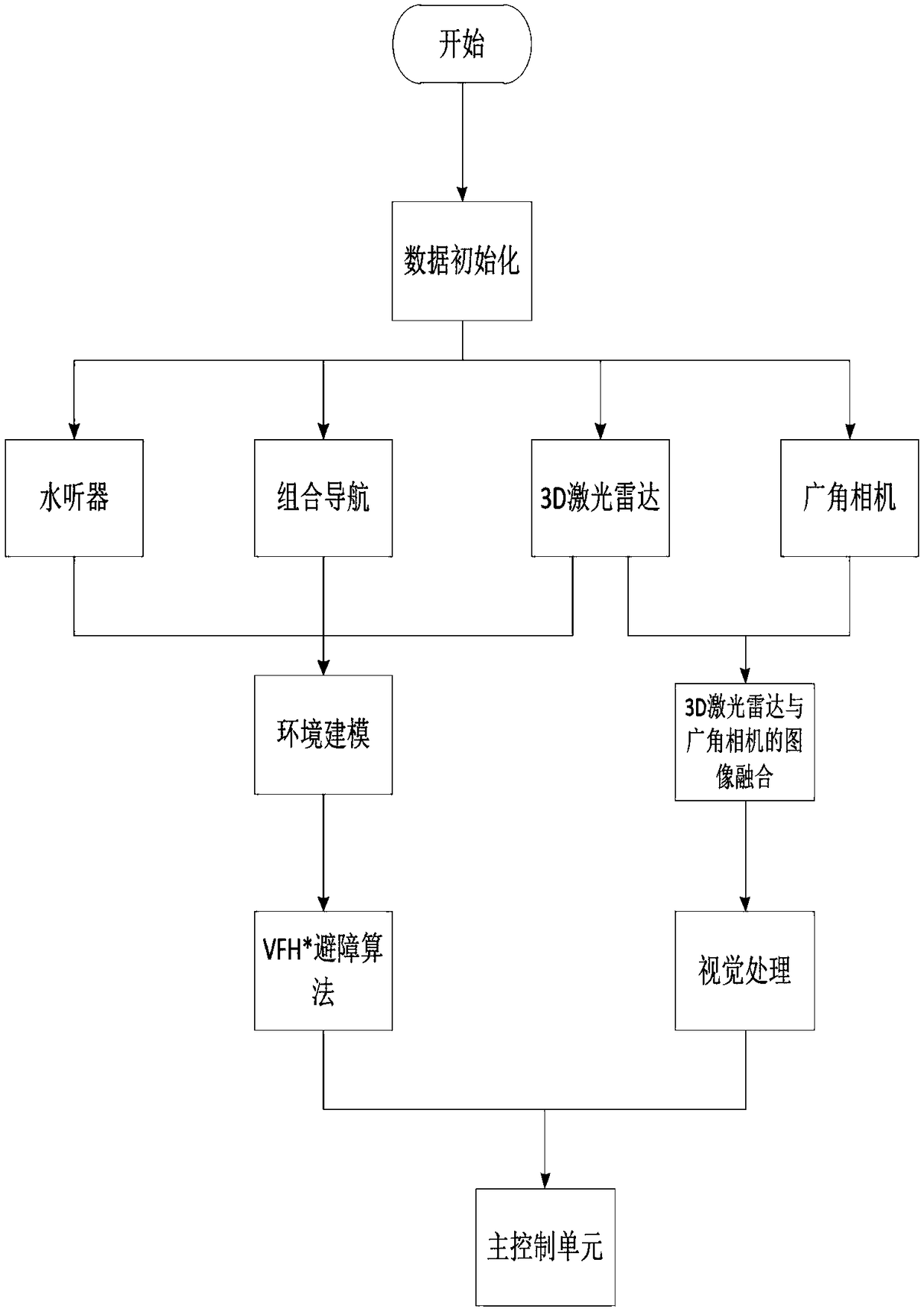
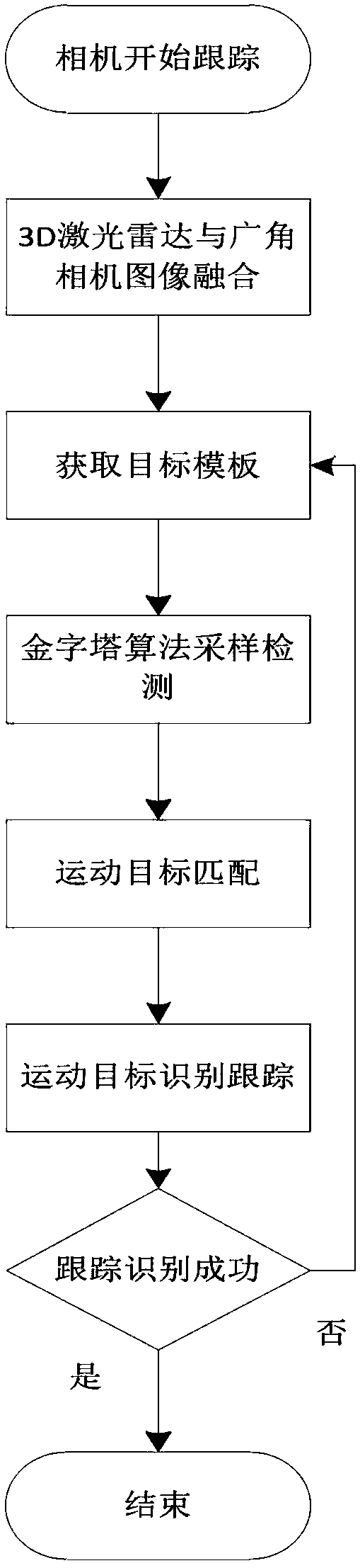
[0035] The present invention will be further described below in conjunction with the accompanying drawings. Such as Figure 1-6 As shown, a target recognition and tracking system of an unmanned ship includes a data acquisition unit, a perception unit, a data processing unit and a main control unit 10;
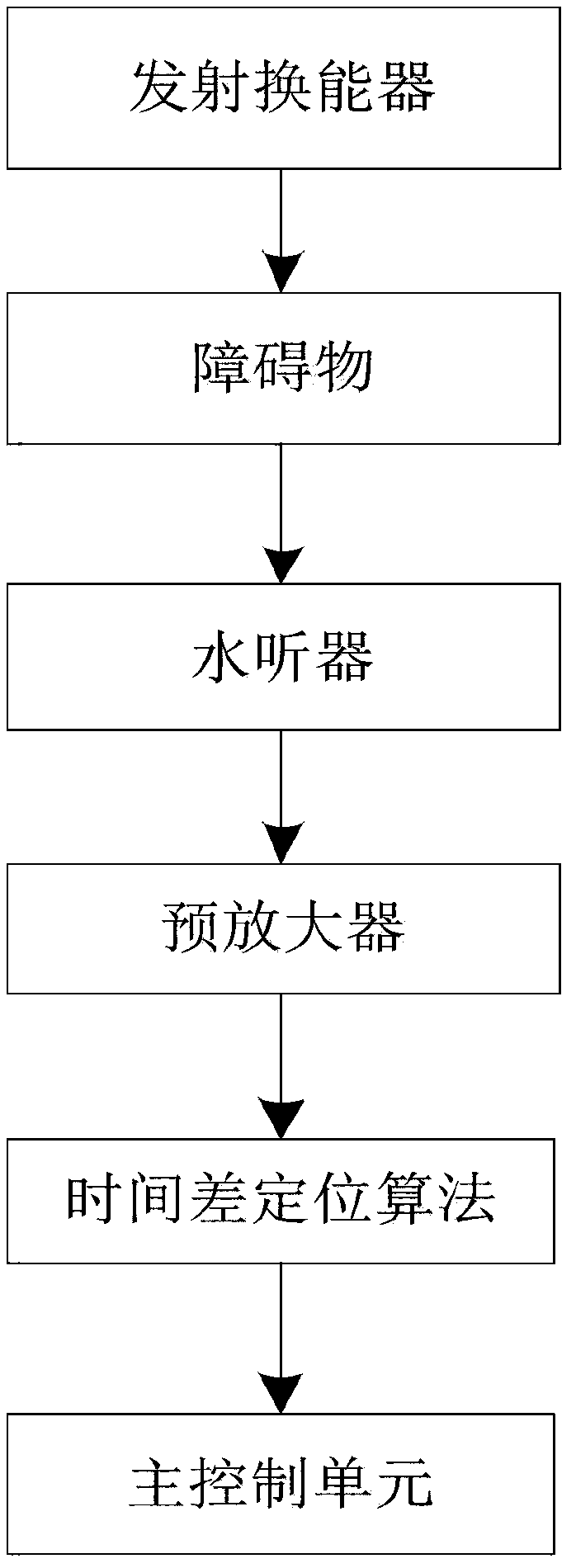
[0036] Described data acquisition unit comprises 3D lidar 5, transmitting transducer 2, a pair of hydrophone 1 and integrated navigation system, and described integrated navigation system comprises GPS navigation system 11 and IMU inertial measurement unit 12; Device 2 and a pair of hydrophone 1 are all connected with hydrophone processor 9;
[0037] The 3D laser radar 5 is installed in the middle of the top platform of the unmanned ship; the transmitting transducer 2 is installed in the center of the lower part of the unmanned ship, which is lower than the draft of the buoy; a pair of vector acoustic hydrophones 1 is installed in the lower part of the unmanned ship The inner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More