

Machine vision based robot automatic locking control system and method
A machine vision and robot technology, applied in the field of automatic control of industrial robots, can solve the problems of slow speed, irregular shape of threaded holes, complicated operation, etc., to reduce locking deviation, improve locking efficiency and locking accuracy, and operation process simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be described in detail below with reference to the accompanying drawings and examples.
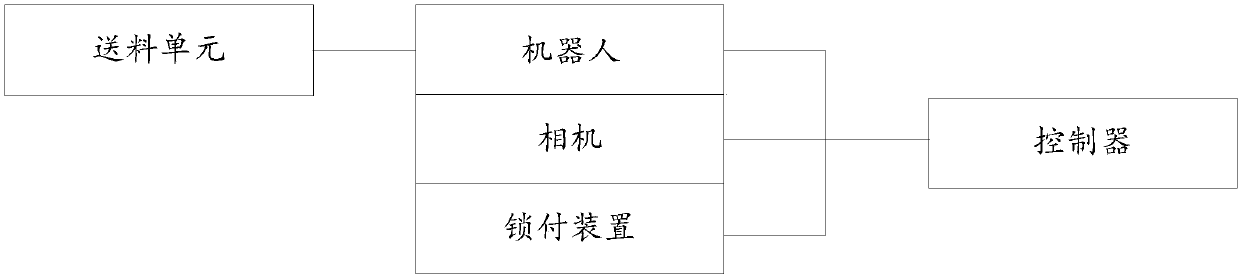
[0033] Please refer to figure 1 , figure 1 It shows the robot automatic locking control system based on machine vision provided by the embodiment of the present invention, the system includes a robot, a controller, a feeding unit, a camera and a locking device.
[0034] The robot is a teaching robot with a teaching box.
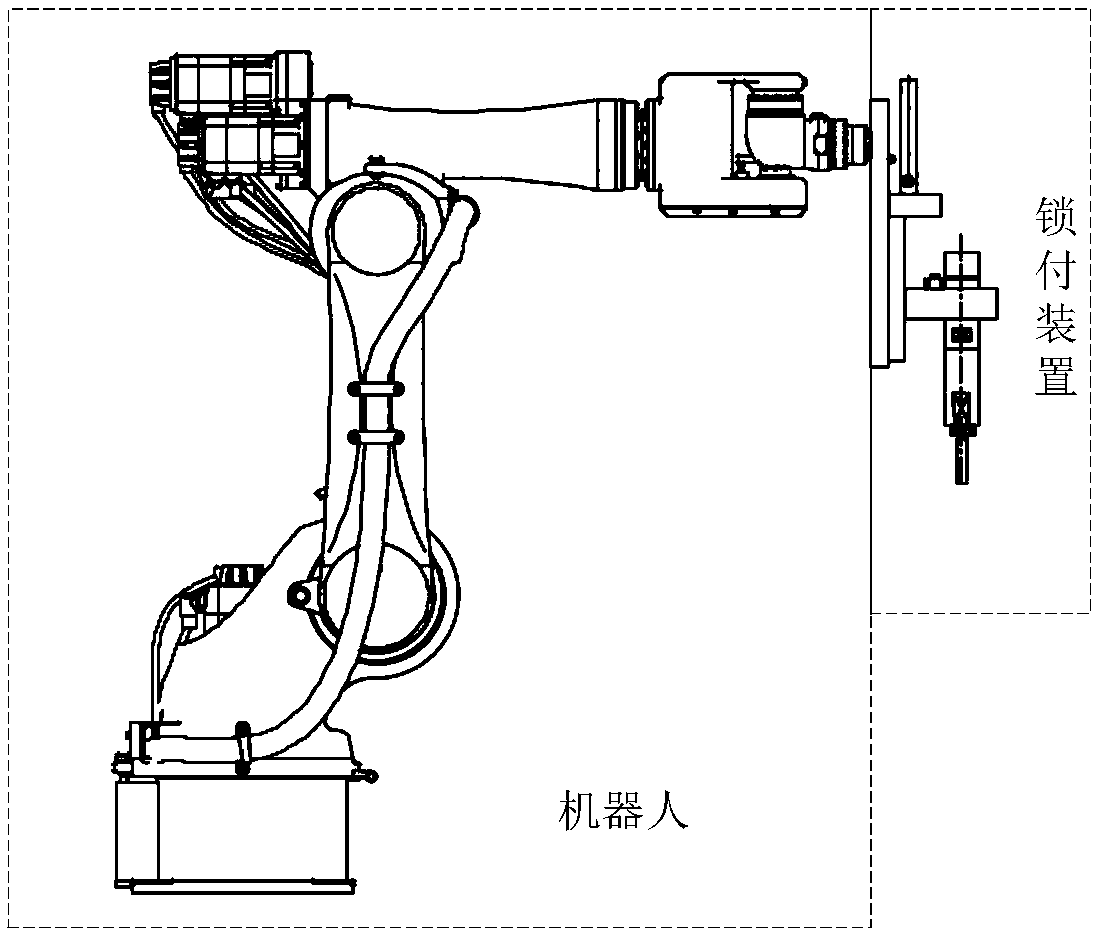
[0035] The locking device is installed at the end of the robot, and the installation structure of the two is as follows: figure 2 shown.
[0036] In the embodiment of the present invention, the locking device includes a feed cylinder, an electric screwdriver, a bolt adsorption device and a torque sensor, the bolt adsorption device is installed at the end of the electric screwdriver, and the bolt adsorption device absorbs the bolt to be used at the fixed-point adsorption position set; The cylinder receives the position control command...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More