

A heading angle deviation estimation method between surface/underwater vehicle and positioning equipment
A technology of course angle deviation and underwater vehicle, which is applied in the direction of instruments, measuring devices, etc., can solve the problems of sensor measurement fixed deviation, course angle inconsistency, installation direction deviation and coordinate conversion deviation, etc., and achieve accurate positioning data and convenient operation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In this embodiment, the underwater vehicle and the ultra-short baseline positioning system (USBL) are taken as examples, and the least square method is used for curve fitting to estimate the heading angle deviation.
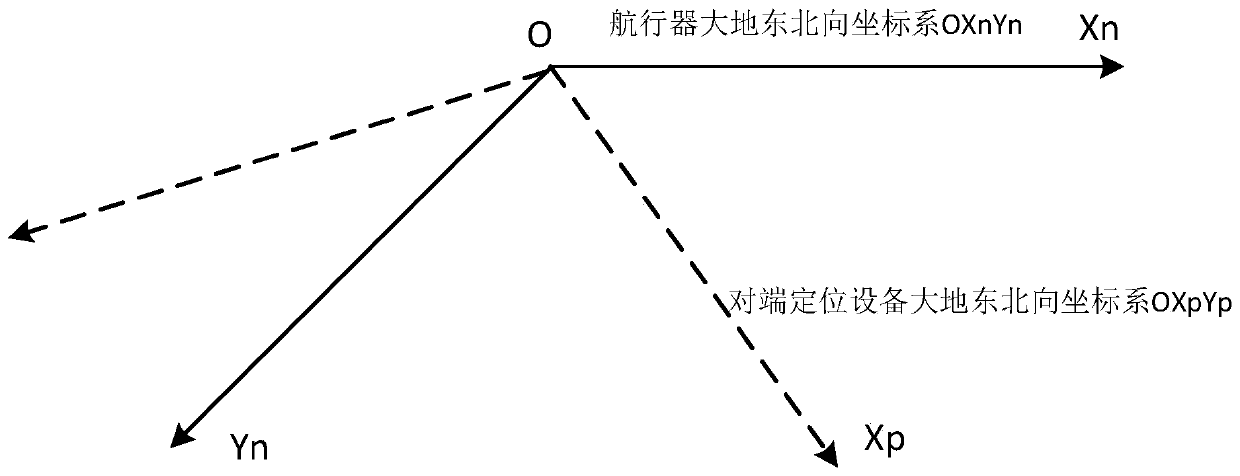
[0022] First, the coordinate system adopted by the present invention is described, as figure 1 As shown in the figure, OXnYn represents the northeast coordinate system of the aircraft, and OXpYp is the northeast coordinate system of the peer positioning equipment. There is a deviation in the heading angle, so there is a deviation angle in the north-east coordinate system that should coincide.
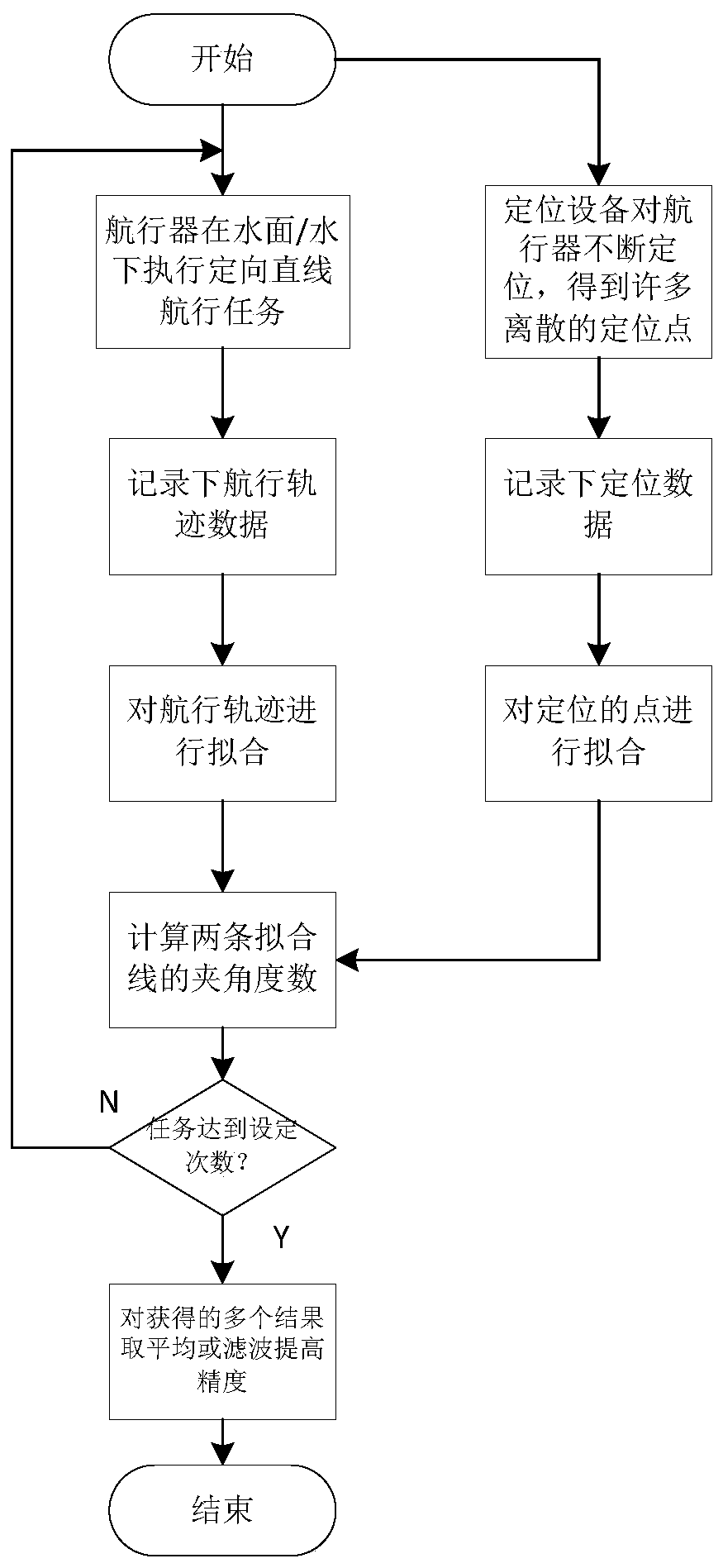
[0023] Such as figure 2 As shown, the flow process of the estimation method of the heading angle deviation of the present invention is introduced, specifically as follows:
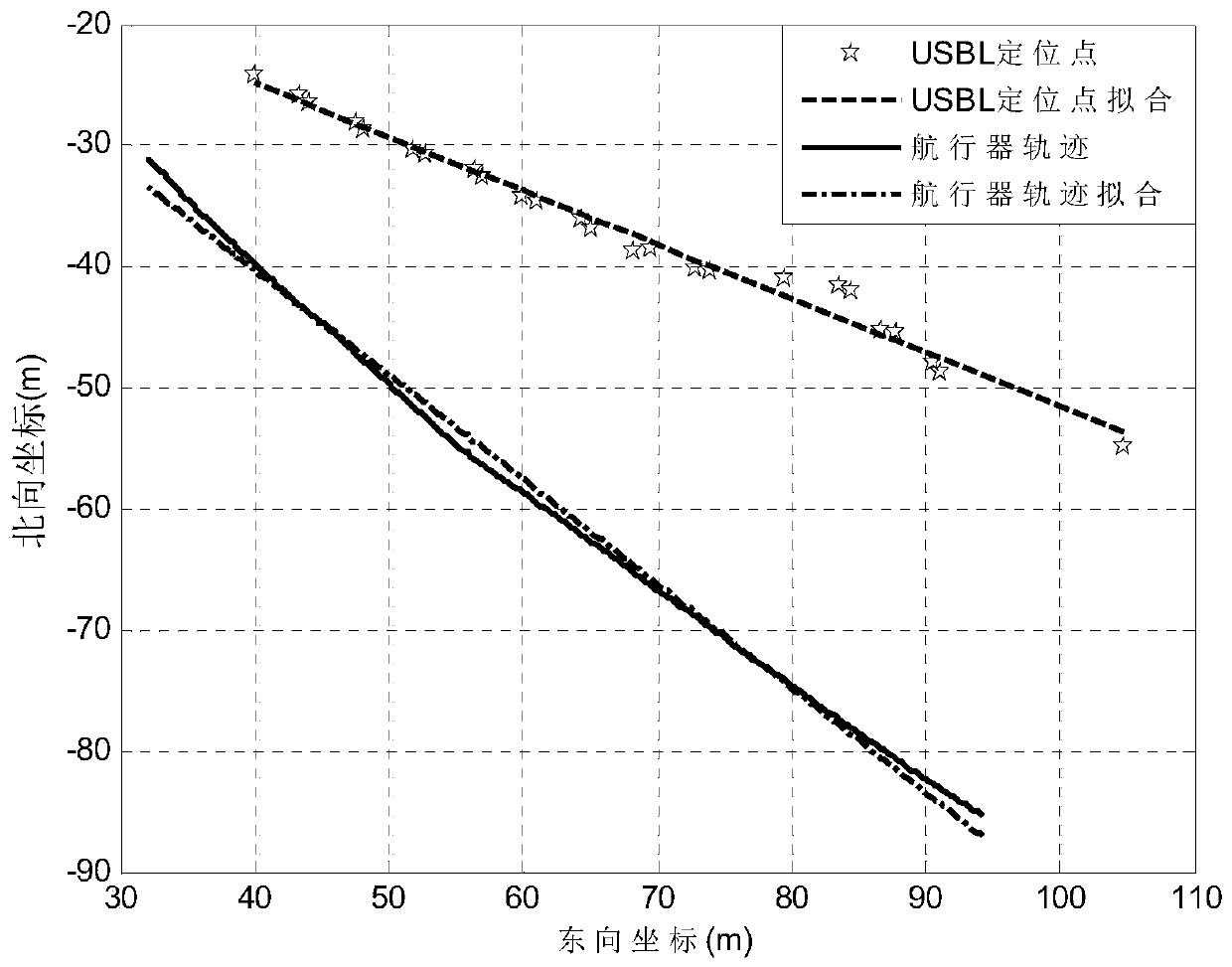
[0024] 1. Data collection
[0025] image 3 The black solid line in the middle is the trajectory of the aircraft, which is actually composed of many discrete points, which are obtained by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More