

Method, control system, and movement setting means for controlling the movements of articulated arms of an industrial robot
An industrial robot, articulated arm technology, applied in general control systems, control/regulation systems, program-controlled manipulators, etc., can solve problems such as poor user friendliness, and achieve the effect of simple and intuitive program design or implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
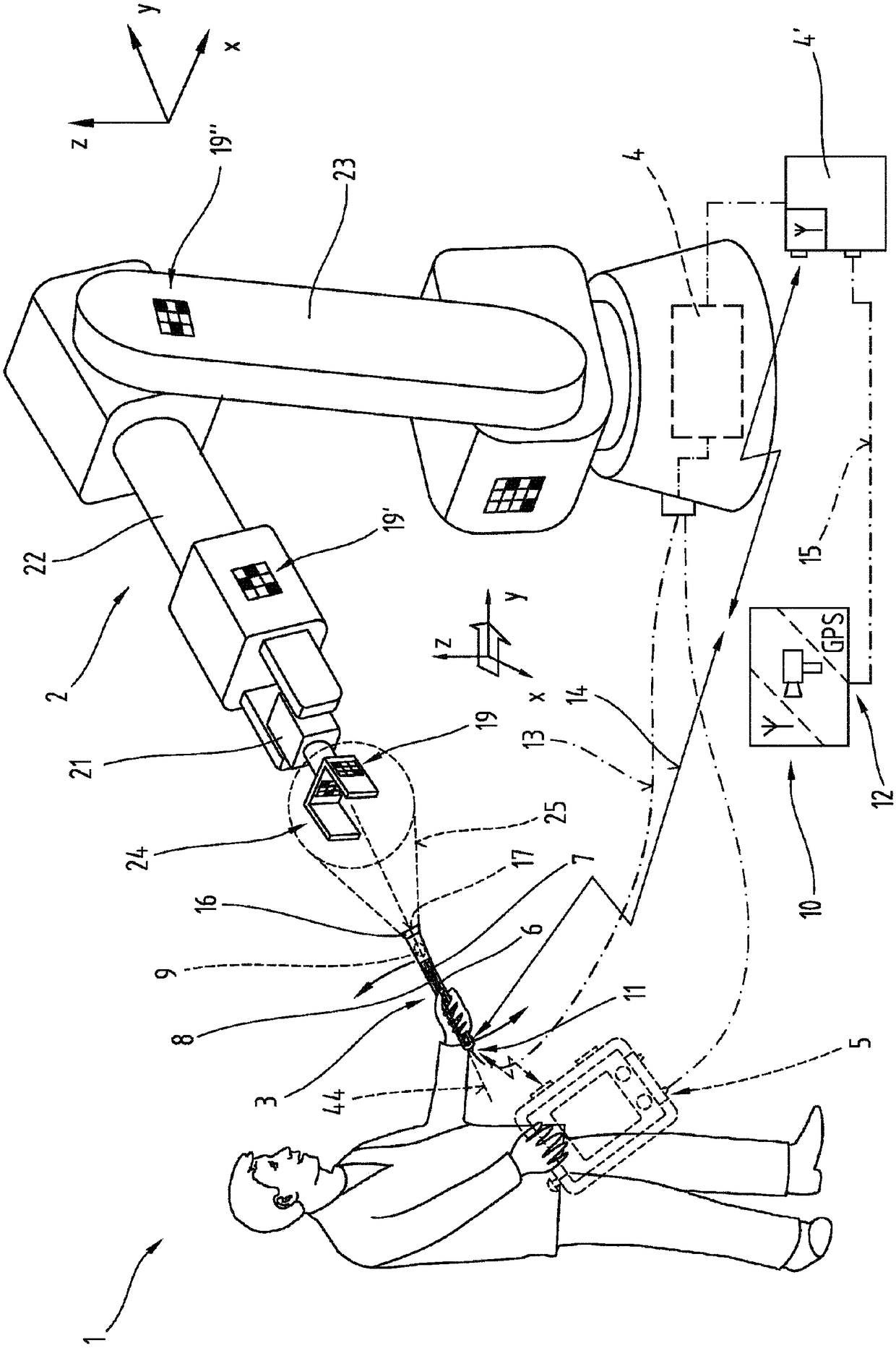
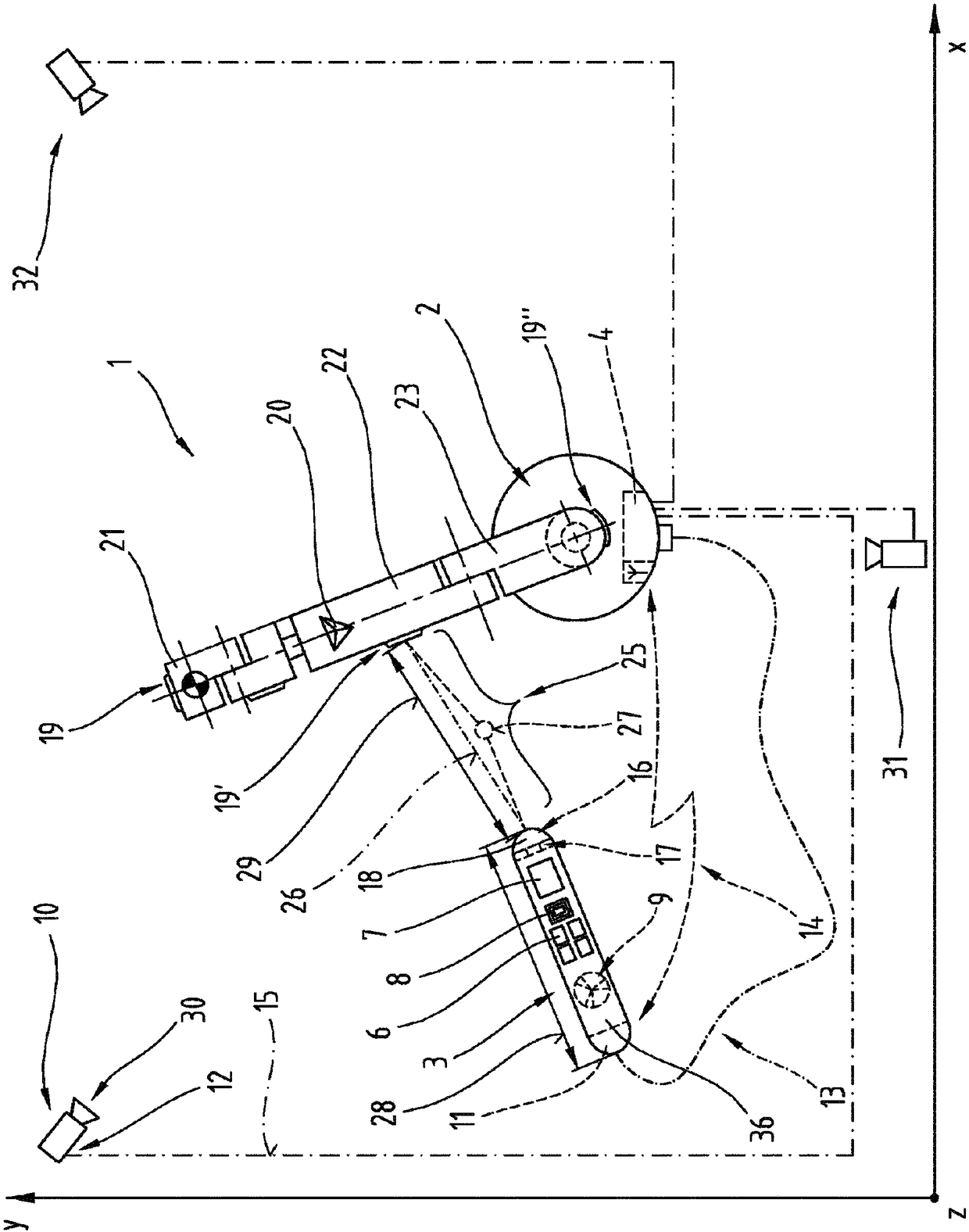
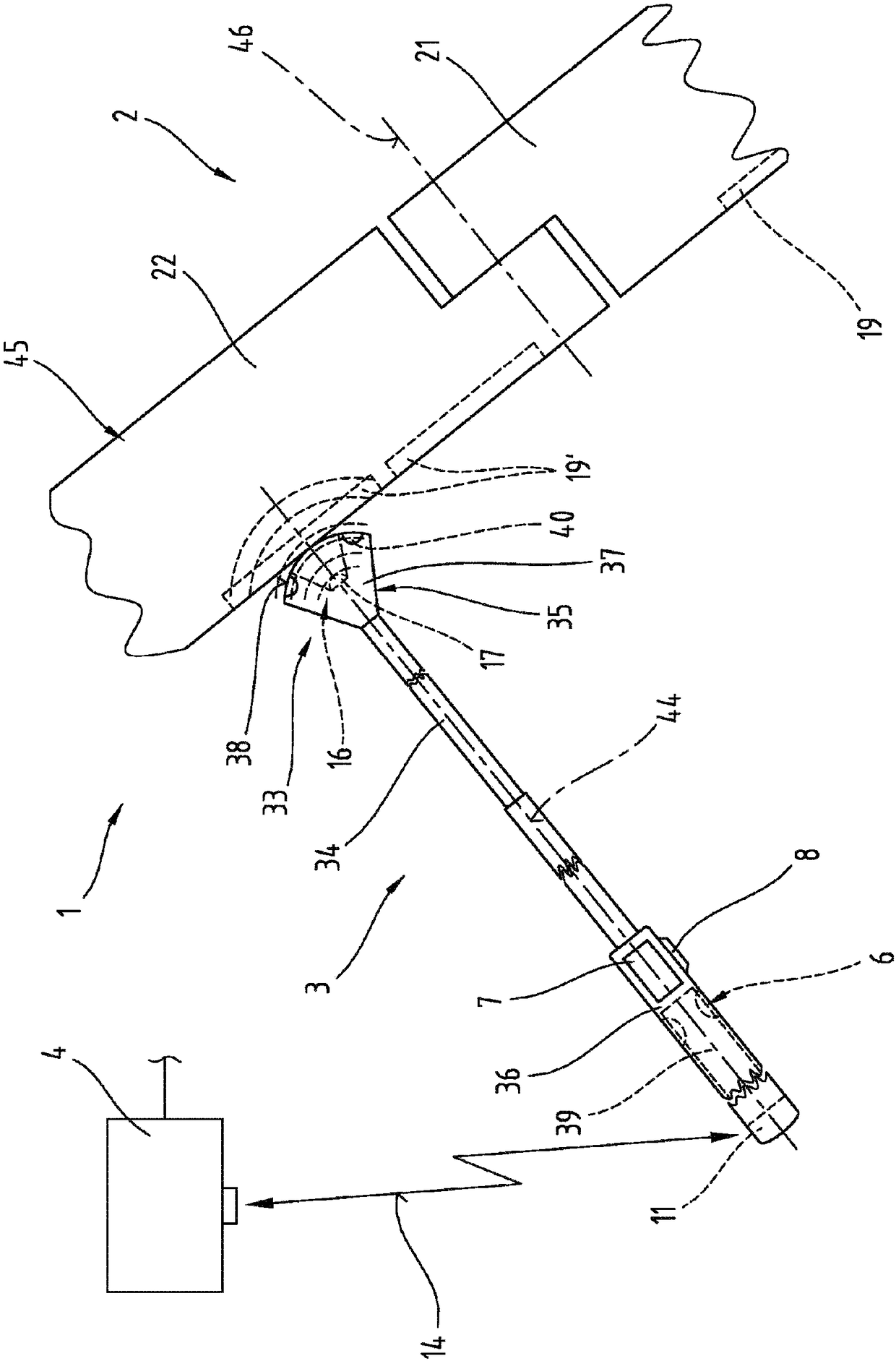
[0041] First of all, it should be confirmed that in the differently described embodiments the same parts have the same reference signs or the same component designations, and that the disclosure contained in the entire description can reasonably be transferred to on the same part of the name. Positional expressions such as top, bottom, side etc. selected in the description also refer to the current description and the illustrated figures and in the event of a change in position these positional specifications can be transferred to the new position as appropriate.
[0042] These examples show possible embodiments of the claimed method or system, wherein it should be pointed out that the invention is not limited to the specifically shown embodiments per se, but also different combinations of the individual embodiments can be realized, and these Possible variants are within the grasp of a person skilled in the art thanks to the teaching of the technical process given by the prese...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More