

Monte-Carlo location algorithm based on self-adaptation iteration volume particle filter
An adaptive iterative and particle filtering technology, applied in navigation computing tools and other directions, can solve the problems of weak real-time processing ability, high-order truncation error, and large amount of calculation, so as to improve real-time processing ability and eliminate high-order truncation errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0018] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
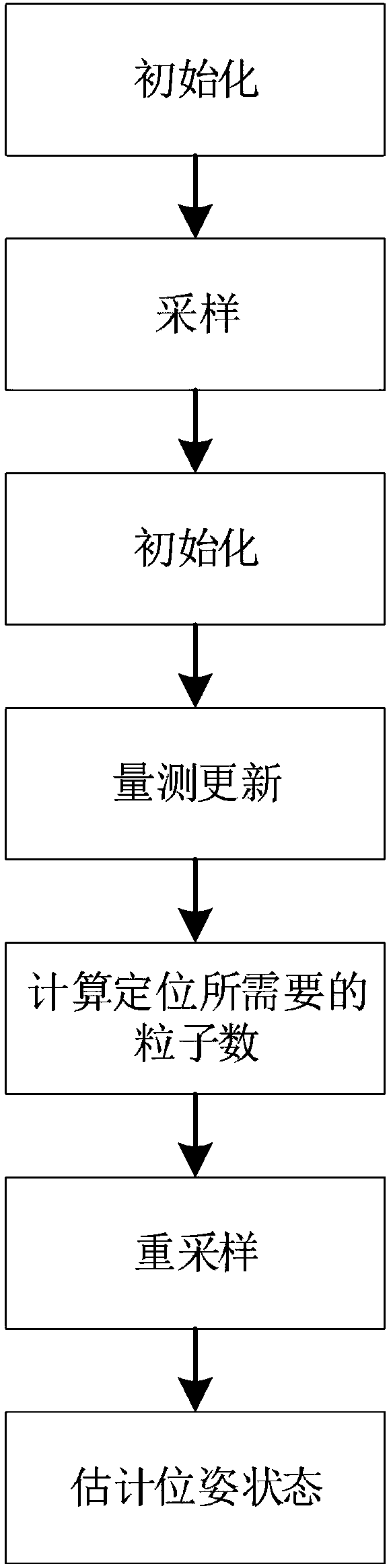
[0019] Such as figure 1 A Monte Carlo positioning algorithm based on adaptive iterative volumetric particle filter is shown, including the following steps:
[0020] Step 1, filter initialization (t=0), determine the initial distribution of the system state N(x 0 ,P 0 ), control noise Q, observation noise R, and bound n χ and δ, interval b size Δ, minimum sample size n m i n , collect n particles from the initial distribution of mobile robot states, namely Calculate the volume point;
[0021] Step 2. Use iterative volumetric Kalman filter to obtain the importance function and according to the importance function Calculate Particle State
[0022] Step 3, filter initialization (t=0), determine the initial distribution of the system state N(x 0 ,P 0 ), control noise Q, observation noise R, and bound n χ and δ, interval b size Δ, mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More