

Cooperative-target-based real-time global search method for high-speed vision measurement
A technology of visual measurement and cooperative target, applied in the field of real-time search of marker points, which can solve the problems of camera resolution sensitivity, long time consumption, limited system update rate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
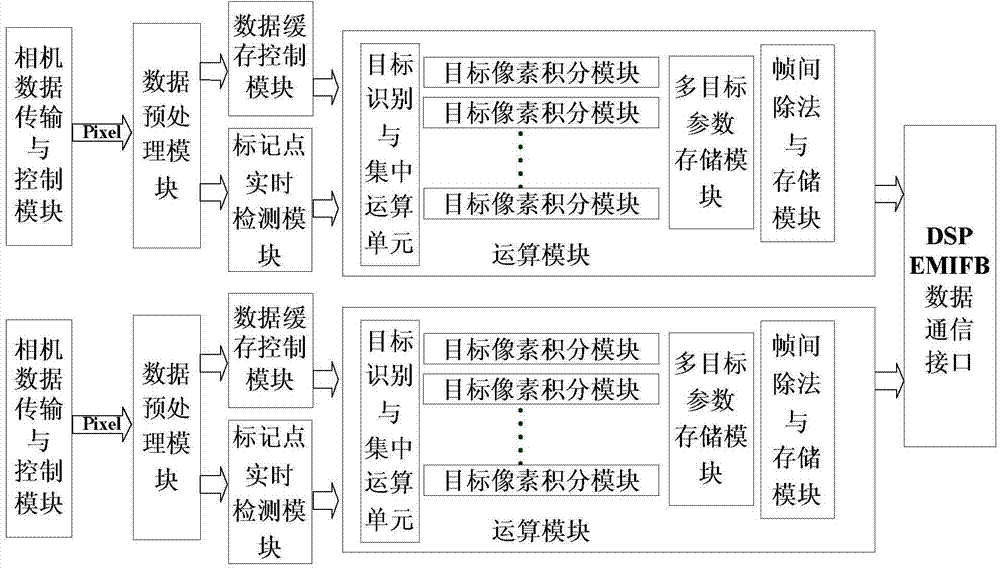
[0062] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment. The FPGA in the real-time global search method based on cooperative targets for high-speed visual measurement described in this embodiment is embedded with a camera data transmission and control module, a data preprocessing module, a data cache control module, and a marker point A real-time detection module and a computing module, the computing module is connected with an external DSP chip through a DSP EMIF data communication interface;
[0063] Camera data transmission and control module: used to complete the camera communication interface control, input the pixel data of the high-speed camera to the data preprocessing module in parallel, and output the synchronous clock signal of the camera to the data preprocessing module at the same time;
[0064] Data pre-processing module: used to ensure that the subsequent clock frequency is below 50MHz, the clock frequency comes from th...
specific Embodiment approach 2
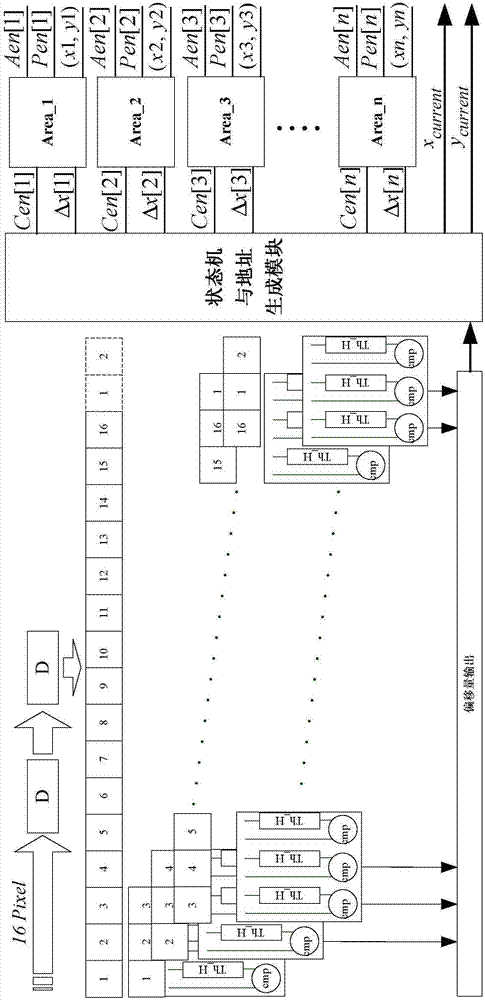
[0096] Specific implementation mode two: combination image 3 with Figure 4 Describe this embodiment. This embodiment is a further limitation of the real-time global search method based on cooperative targets for high-speed visual measurement described in Embodiment 1. In this embodiment, the real-time detection module of the mark points The method of detection is:
[0097] In each clock cycle, the parallel 16-pixel data entering the real-time detection module of the mark point is buffered by two-level D flip-flops, and then judged with a high threshold Th_H:
[0098] Three adjacent pixels are defined as a pixel segment, and the first pixels of the 16 pixel segments are divided into the 1st to 16th pixels respectively, and the three pixels of the 15th pixel segment are the 15th pixel, the 16th pixel and the next clock cycle The first pixel, the three pixels of the 16th pixel segment are the 16th pixel and the first two pixels of the next clock cycle, the pixel data of the n...
specific Embodiment approach 3
[0106] Specific embodiment three: This embodiment is a further limitation of the real-time global search method based on cooperative targets for high-speed visual measurement described in embodiment two. In this embodiment, the state machine and address generation module described The state machine includes the following states:
[0107] DLE state: variable initialization, and judge whether fval reaches the rising edge, if the judgment result is yes, jump to FVAL_H1 state; otherwise, jump back to IDLE state;
[0108] FVAL_H1 state: Judging whether a marker point is found, if the judgment result is yes, jump to the FVAL_H2 state; otherwise, judge whether fval reaches the falling edge, if the judgment result is yes, jump to the FVAL_L state; otherwise, jump to the FVAL_H1 state;
[0109] FVAL_H2 state: judge whether fval reaches the falling edge, if the judgment result is yes, jump to FVAL_L state; otherwise, jump back to FVAL_H2 state;
[0110] FVAL_L state: judge whether the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More