

Method and device for controlling UAV(unmanned aerial vehicle) in target area through ground station
A target area and ground station technology, applied in the field of UAV control, can solve the problems of poor stability and robustness, achieve the effect of improving stability and robustness, and solving poor stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
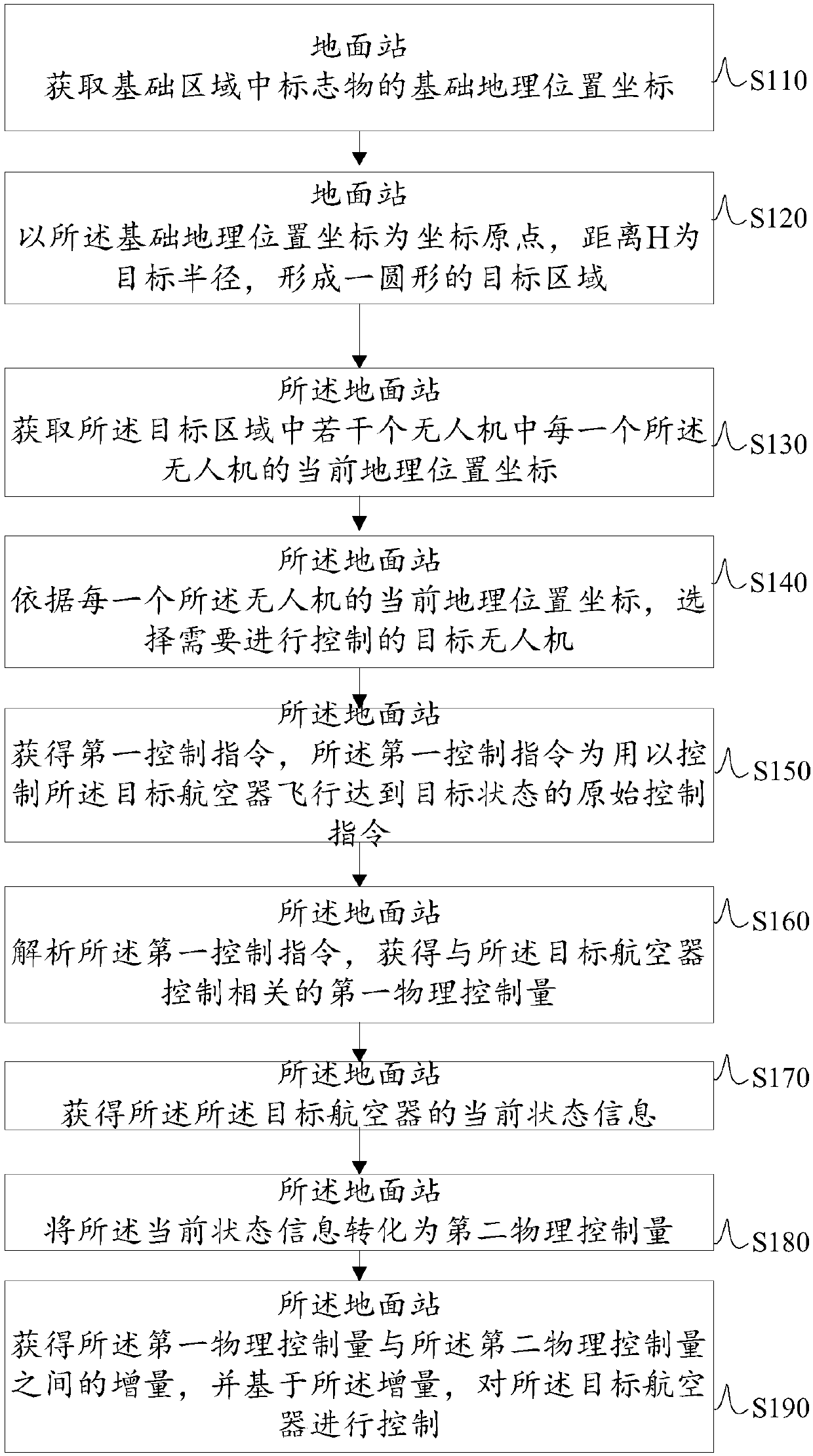
[0089] The first aspect of the present invention provides a method for controlling the UAV in the target area through the ground station, please refer to figure 1 , is a flowchart of a method for controlling a drone in a target area through a ground station in an embodiment of the present invention.
[0090] What needs to be explained first is that the method can be applied to a communication command vehicle for controlling and monitoring UAVs, or a ground station with a computer-operated control function (the ground station is a portable box with an integrated Laptop), or remote control terminal (such as control room, monitoring room, etc.). In other words, the above-mentioned steps in the embodiment of the present invention include the steps to be described below, and its executive body can be a communication command vehicle, so that the control method of the UAV can be controlled in the vehicle, or it can be A ground station with a computer operation function and a portabl...
Embodiment 2
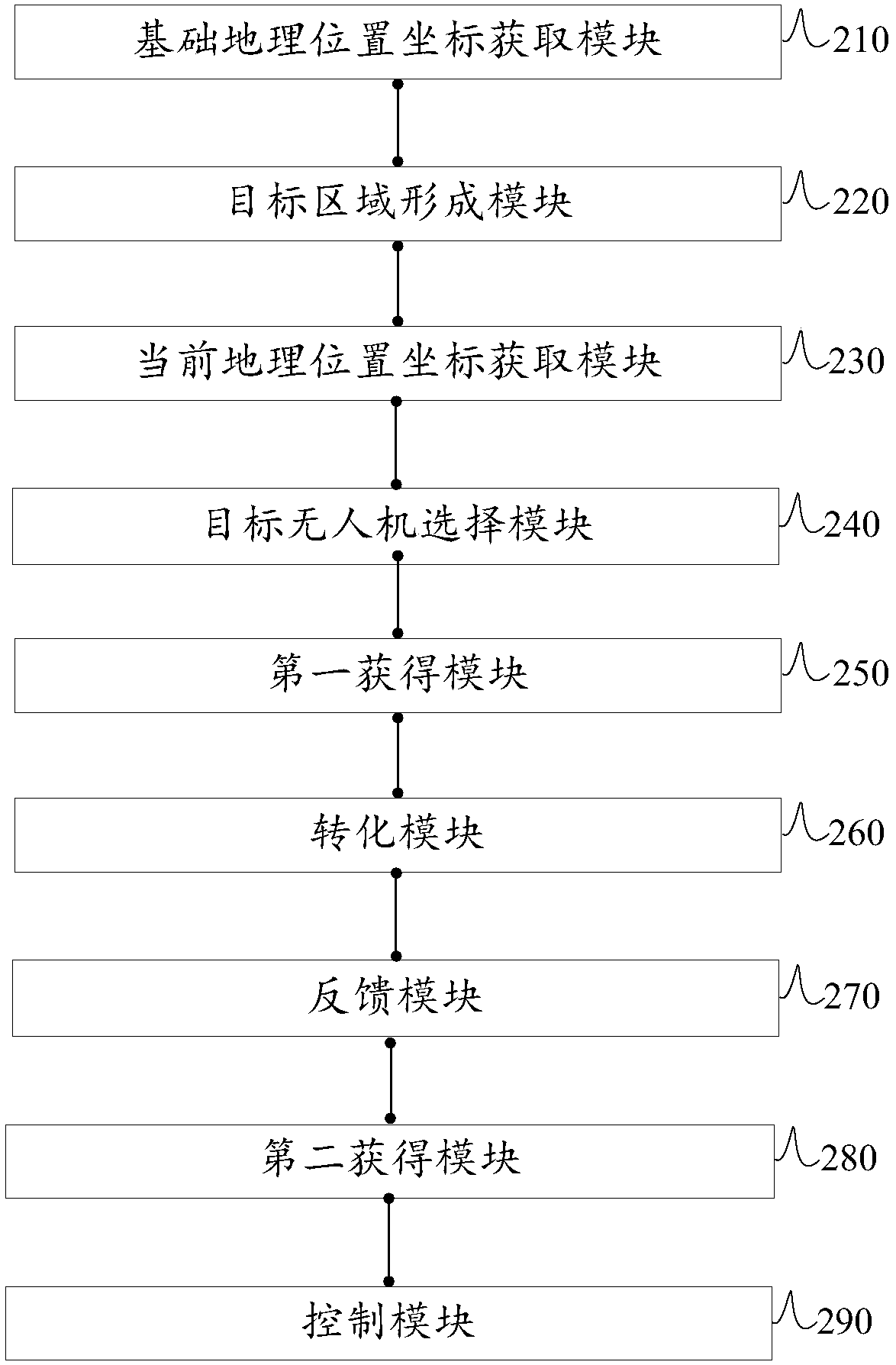
[0136] Based on the same inventive concept as the method of controlling the UAV in the target area by the ground station in the aforementioned first aspect, Embodiment 2 of the present invention also provides a control device for the UAV, such as figure 2 shown, including:
[0137] The basic geographic location coordinate acquisition module 210 is used for the ground station to obtain the basic geographic location coordinates of markers in the basic area;
[0138] The target area forming module 220 is used for the ground station to form a circular target area with the coordinates of the basic geographic location as the coordinate origin and the distance H as the target radius;
[0139] The current geographic location coordinate acquisition module 230 is used for the ground station to acquire the current geographic location coordinates of each of the several drones;
[0140] The target UAV selection module 240 is used for the ground station to select the target UAV that needs...
Embodiment 3
[0159] Based on the same inventive concept as the method of controlling the UAV in the target area through the ground station in the first embodiment, the third embodiment of the present invention also provides a computer-readable storage medium, such as image 3 As shown, there is stored thereon a computer program which, when executed by a processor, implements the following steps:
[0160] The ground station obtains the basic geographic location coordinates of the markers in the basic area;
[0161] The ground station takes the coordinates of the basic geographic location as the coordinate origin, and the distance H as the target radius to form a circular target area;
[0162] The ground station acquires the current geographic location coordinates of each of the several drones in the target area;
[0163] The ground station selects the target drone to be controlled according to the current geographic location coordinates of each drone;
[0164] The ground station obtains a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More