

A repairing method, device and robot for 3D point cloud data
A 3D point cloud and patcher technology, applied in the field of robotics, can solve problems such as poor quality of 3D point cloud data, and achieve the effect of solving poor quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
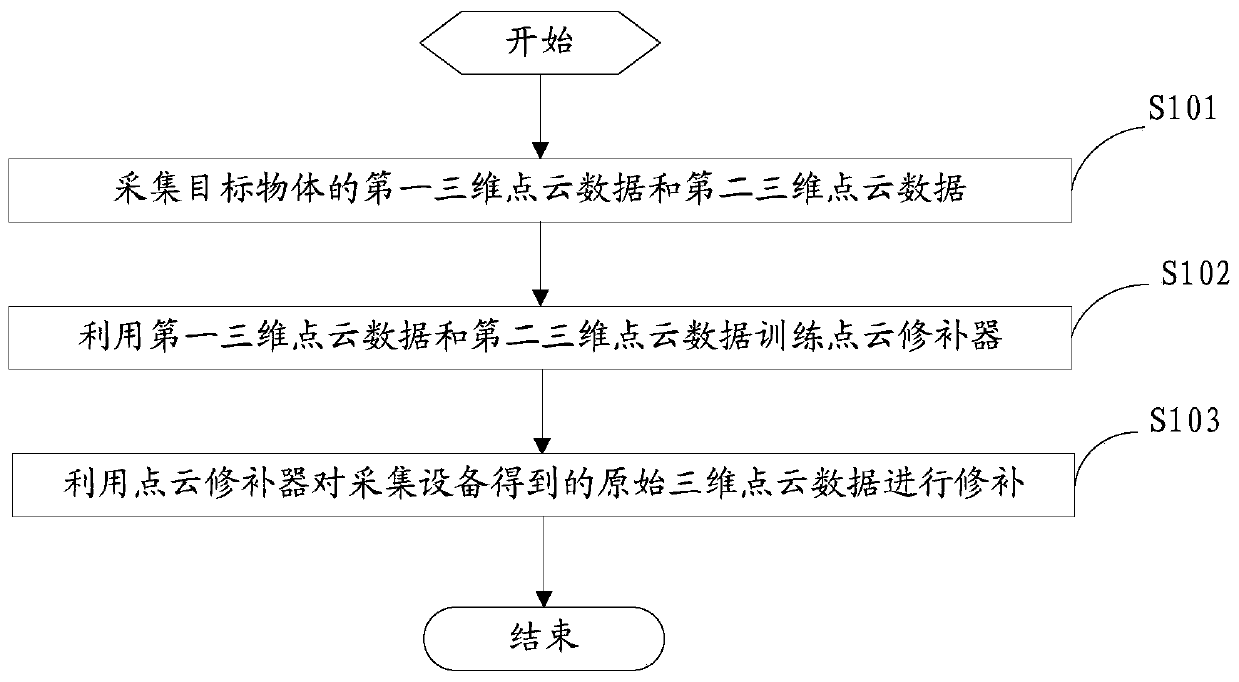
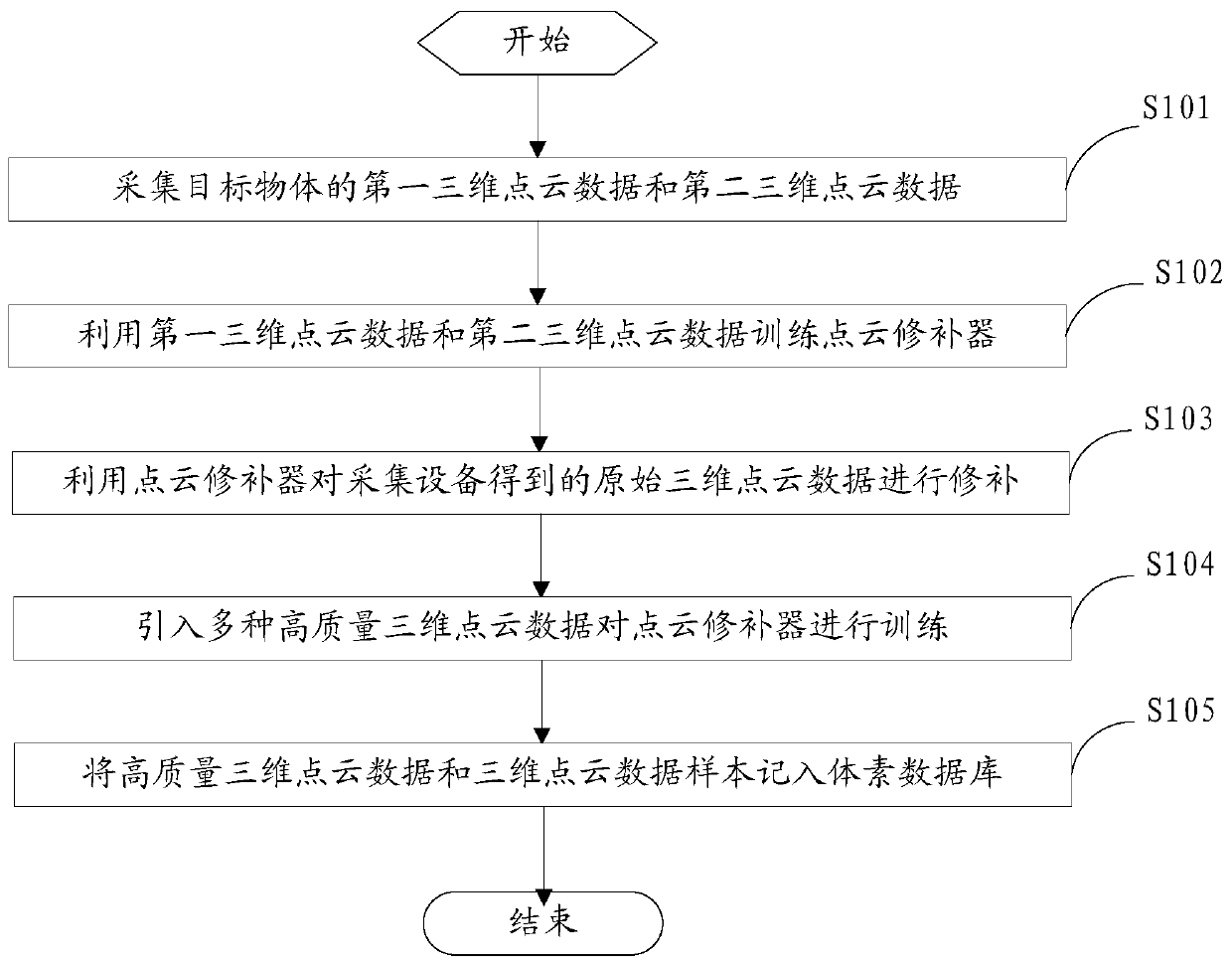
[0046] figure 1 It is a flow chart of the steps of a method for repairing 3D point cloud data provided by the embodiment of the present application.
[0047] like figure 1 As shown, the method for repairing the 3D point cloud data provided by this embodiment is applied to the robot, and is specifically used to repair the 3D point cloud data obtained by the robot through the acquisition device, and specifically includes the following steps:
[0048] S101: Collect first 3D point cloud data and second 3D point cloud data of a target object.
[0049] For a specific target object selected by the user, when the robot is at a specific position, the first 3D point cloud data and the second 3D point cloud data collected by the robot's collection device for the target object are obtained.
[0050] The difference between the first 3D point cloud data and the second 3D point cloud data is that the data quality of the two is different. In this embodiment, the data quality of the first 3D...
Embodiment 2
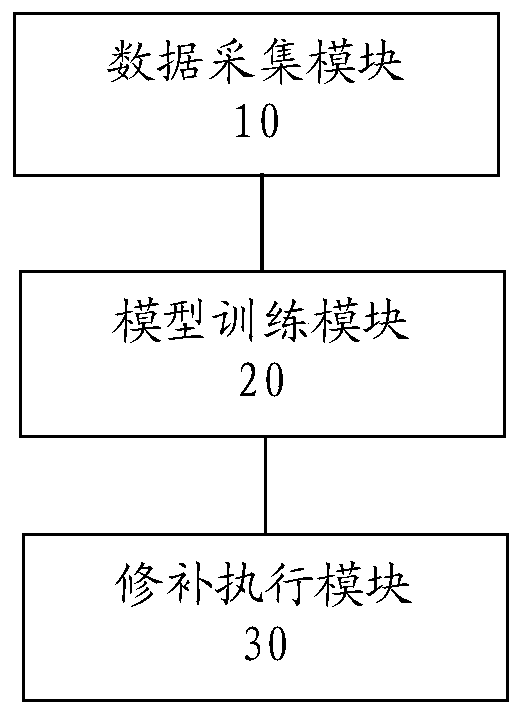
[0070] image 3 It is a structural block diagram of an apparatus for repairing 3D point cloud data provided by an embodiment of the present application.
[0071] like image 3 As shown, the device for repairing 3D point cloud data provided by this embodiment is applied to a robot, and is specifically used to repair the 3D point cloud data obtained by the robot through the acquisition equipment. The device specifically includes a data acquisition module 10, a model training module 20 and Patch execution module 30 .
[0072] The data collection module is used to collect the first 3D point cloud data and the second 3D point cloud data of the target object.
[0073] For a specific target object selected by the user, when the robot is at a specific position, the first 3D point cloud data and the second 3D point cloud data collected by the robot's collection device for the target object are obtained.
[0074] The difference between the first 3D point cloud data and the second 3D ...
Embodiment 3
[0094]This embodiment provides a robot, which is provided with the three-dimensional point cloud data repairing device as provided in the previous embodiment. The device is specifically used to collect the first three-dimensional point cloud data and the second three-dimensional point cloud data corresponding to each other of a specific target object, the data quality of the first three-dimensional point cloud data is lower than the data quality of the second three-dimensional point cloud data , and the data quality of the first 3D point cloud data is the same or similar to the data quality of the 3D point cloud data that can be obtained by the acquisition equipment; using the first 3D point cloud data and the second 3D point cloud data for neural network model training, will get The objective function of is used as a point cloud patcher; the original 3D point cloud data obtained by the acquisition device is input into the point cloud patcher, and the patched target 3D point cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More