

Robot self-directed learning method for human-machine cooperation
A technology of human-machine collaboration and autonomous learning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems that affect the effect of learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with the examples, but the embodiments of the present invention are not limited thereto. If there are any parts that are not specifically described in detail below, those skilled in the art can realize or understand with reference to the prior art.
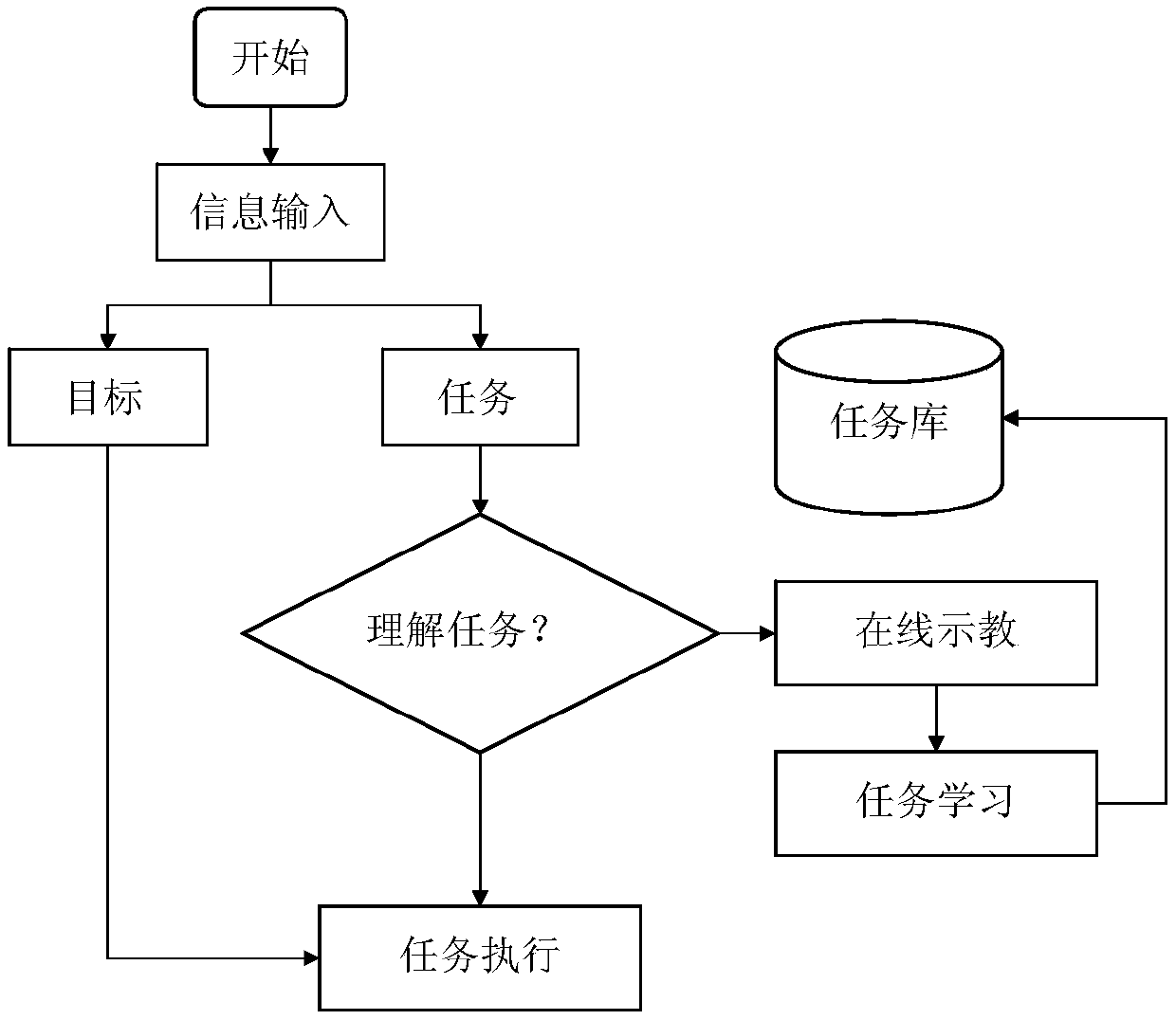
[0017] A robot autonomous learning method oriented to human-machine collaboration, including the following steps:
[0018] S1. Design a deep learning method for human-machine collaboration at the level of target understanding to introduce human experience and knowledge;
[0019] S2. Introduce human evaluation and feedback to optimize the reinforcement learning algorithm at the task learning level.
[0020] The step S1 specifically includes:
[0021] First, a reduced feature set is used to identify the best candidates, and then, a larger, more reliable feature set is used to rank these candidates. However, these methods need to design two indepe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More