

Overdrive system control allocation method based on geometrically intuitively built reachable set
A technology of control distribution and overdrive, which is applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of difficult to meet the real-time requirements of the system, large amount of calculation, etc., and achieve the reduction of the control efficiency matrix dimension, the method is intuitive, easy-to-understand effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below with reference to the accompanying drawings and examples.
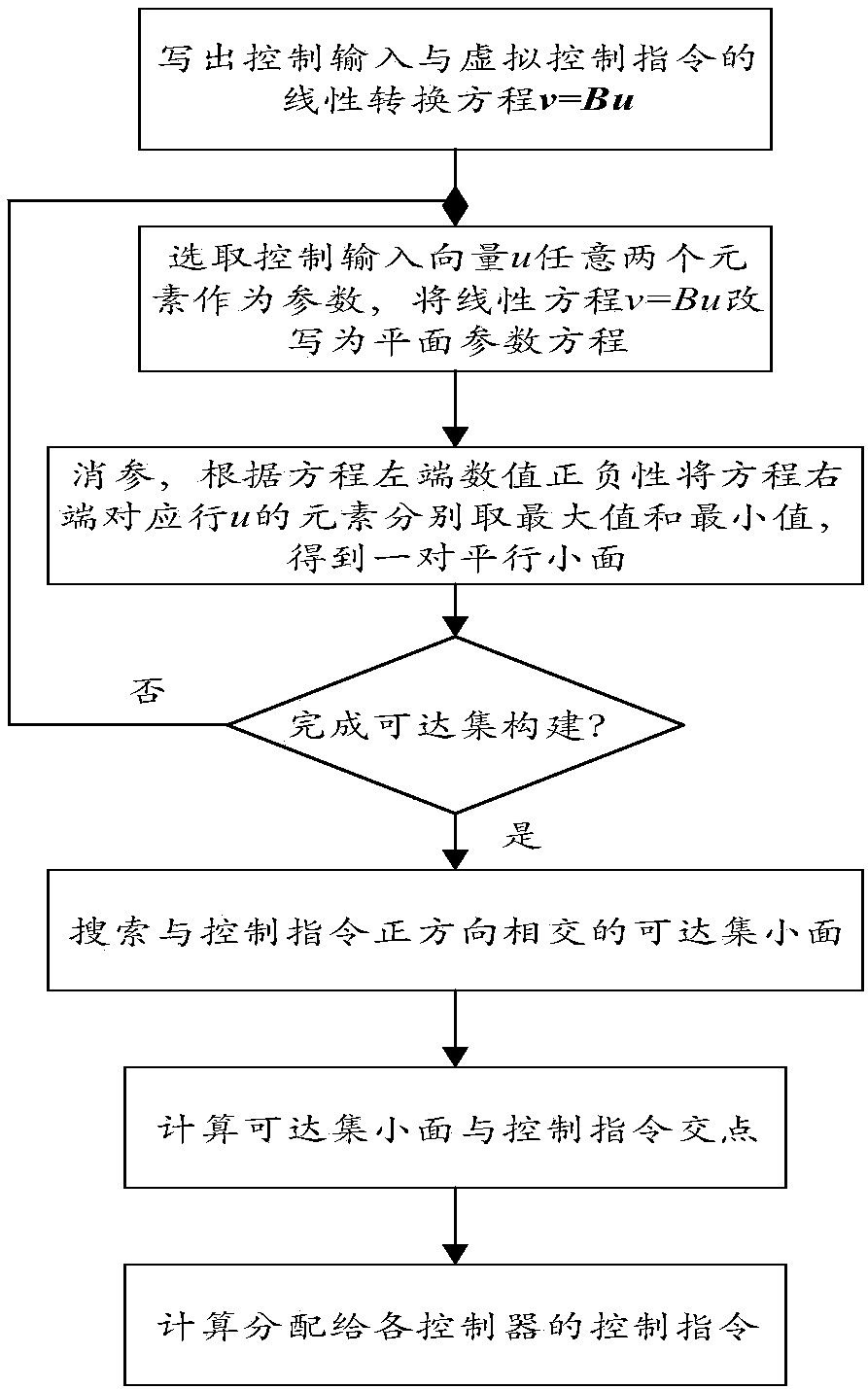
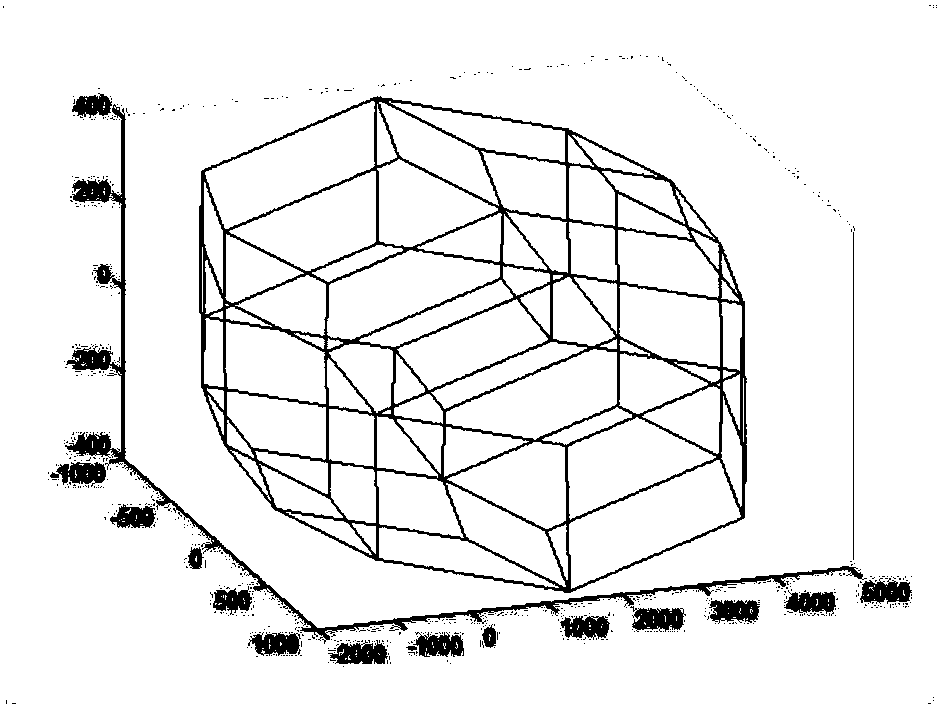
[0032] For systems where the actuator is limited only by the deflection position, the reachable set is fixed. When the control degree of freedom (DOF) is 3, the reachable set is a polyhedron in three-dimensional space. When there are m actuators in the system, the virtual control instruction v and control input u can be expressed as:
[0033] v=[v 1 v 2 v 3 ] T
[0034] u=[u 1 u 2 u 3 ] T
[0035] Rewrite the control efficiency matrix into a column vector form:
[0036] B=[b 1 b 2 ...b m ]
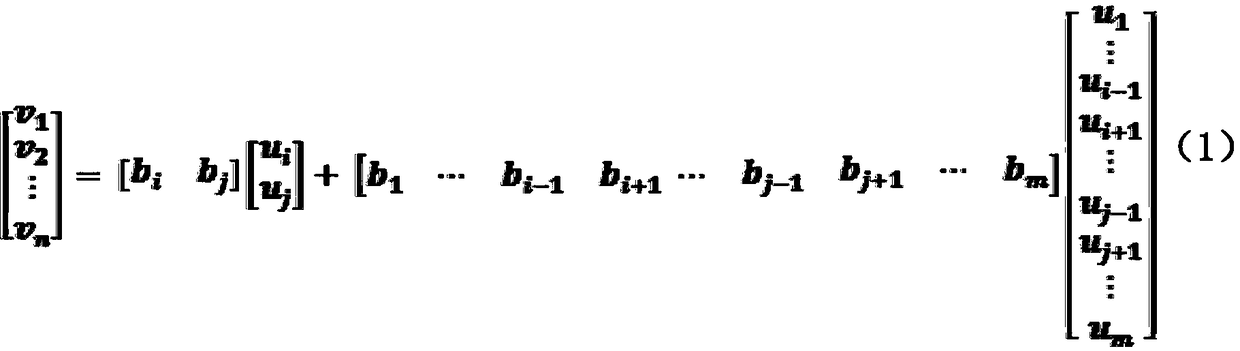
[0037] The premise of the algorithm must ensure that the columns of the control efficiency matrix B are linearly independent. Then the linear transformation model between the control command and the control input is:
[0038]
[0039] remove b alone 1 ,b 2 The product term gives:
[0040]
[0041] Formula (2) can be regarded as R 3 u in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More