Method and terminal for real-time interactive interpretation of unmanned aerial vehicle
A real-time interaction and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of insufficient use of surveying and mapping business data, insufficient integration of software use and data, and pilots' inability to record real-time image transmission and interpretation information, etc., to achieve improved Observe the effects of speed, avoiding tidying, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
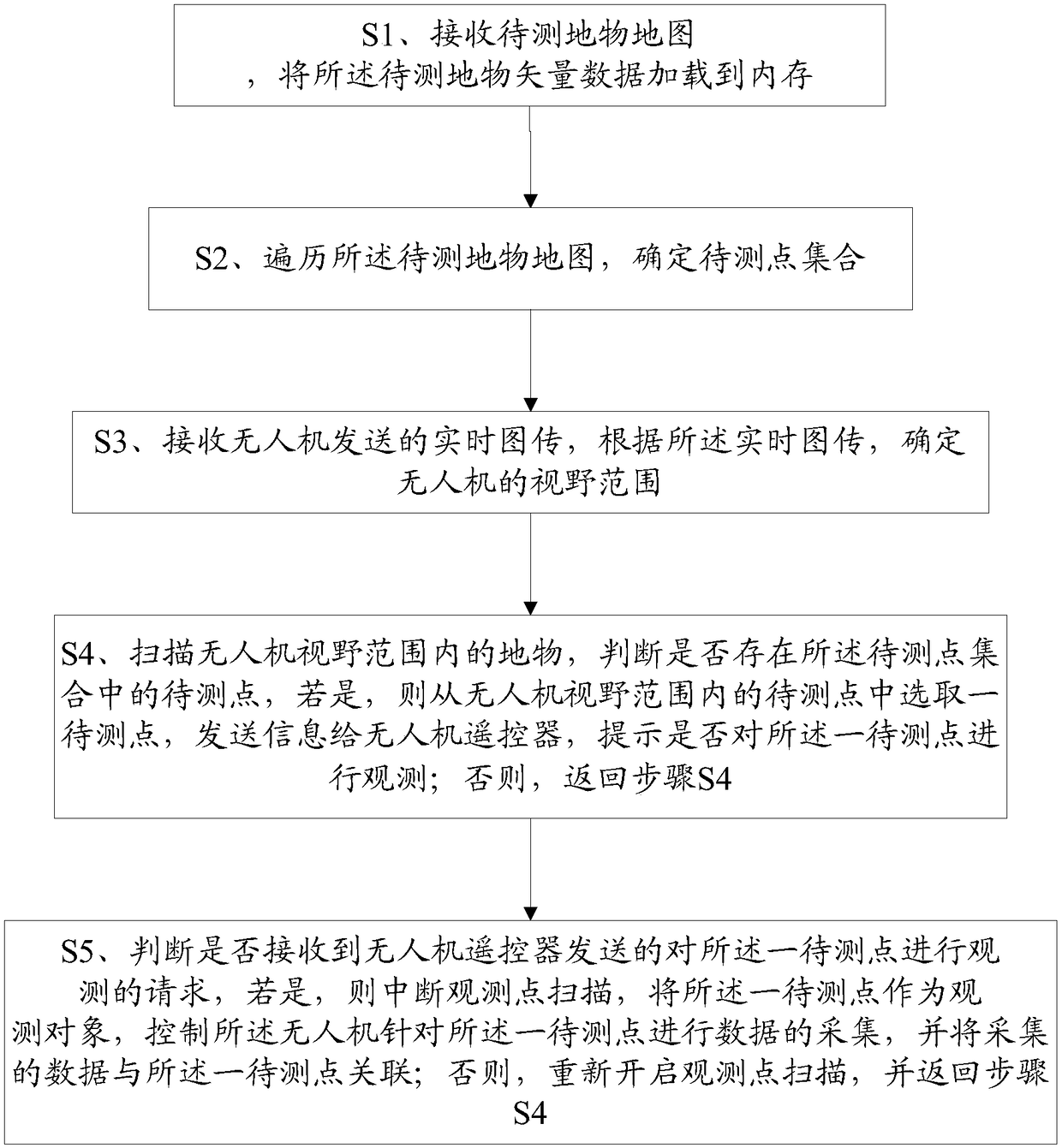
[0067] Please refer to figure 1 , a method for real-time interactive interpretation of unmanned aerial vehicles, comprising steps:
[0068] S1. Receive the map of the ground object to be measured, and load the map of the ground object to be measured into the memory;
[0069] The ground object map to be measured can be completed on the PC side using arcmap software, and the basic data are processed to make a map package to be observed. The basic data includes a high-definition image base map, a digital elevation model DEM, and a vector of ground objects to be observed. data and high-risk areas;
[0070] In order to improve the resolution for easy viewing, the resolution of the image base map should not be lower than 1m, preferably 0.2-0.5m, the DEM resolution should not be lower than 30m, preferably 5m, and the accuracy of vector data collection should not be lower than 2.5m;
[0071] The above basic data are unified to Web Mercator through projection transformation to improv...
Embodiment 2
[0099] Please refer to figure 2 , a terminal 1 for real-time interactive interpretation of drones, including a memory 2, a processor 3, and a computer program stored in the memory 2 and operable on the processor 3, and the processor 3 executes the A computer program realizes the steps of the first embodiment.
[0100] To sum up, the method and terminal for real-time interactive interpretation of a drone provided by the present invention first determine the set of points to be measured, and if there are points to be measured in the set of points to be measured within the field of vision of the drone, then Select a point to be measured and send it to the UAV remote controller to prompt whether to observe the point to be measured. After collecting data for a point to be measured, associate the collected data with the point to be measured to realize The real-time interactive interpretation with the UAV can automatically establish the points to be measured, ensuring that all grou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More