Method, device and system for detecting road surface conditions through depth camera
A road state and depth camera technology, applied in measurement devices, control/adjustment systems, two-dimensional position/channel control, etc., can solve the problems of detection failure and incomplete detection points, and achieve low detection costs and avoid damage. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
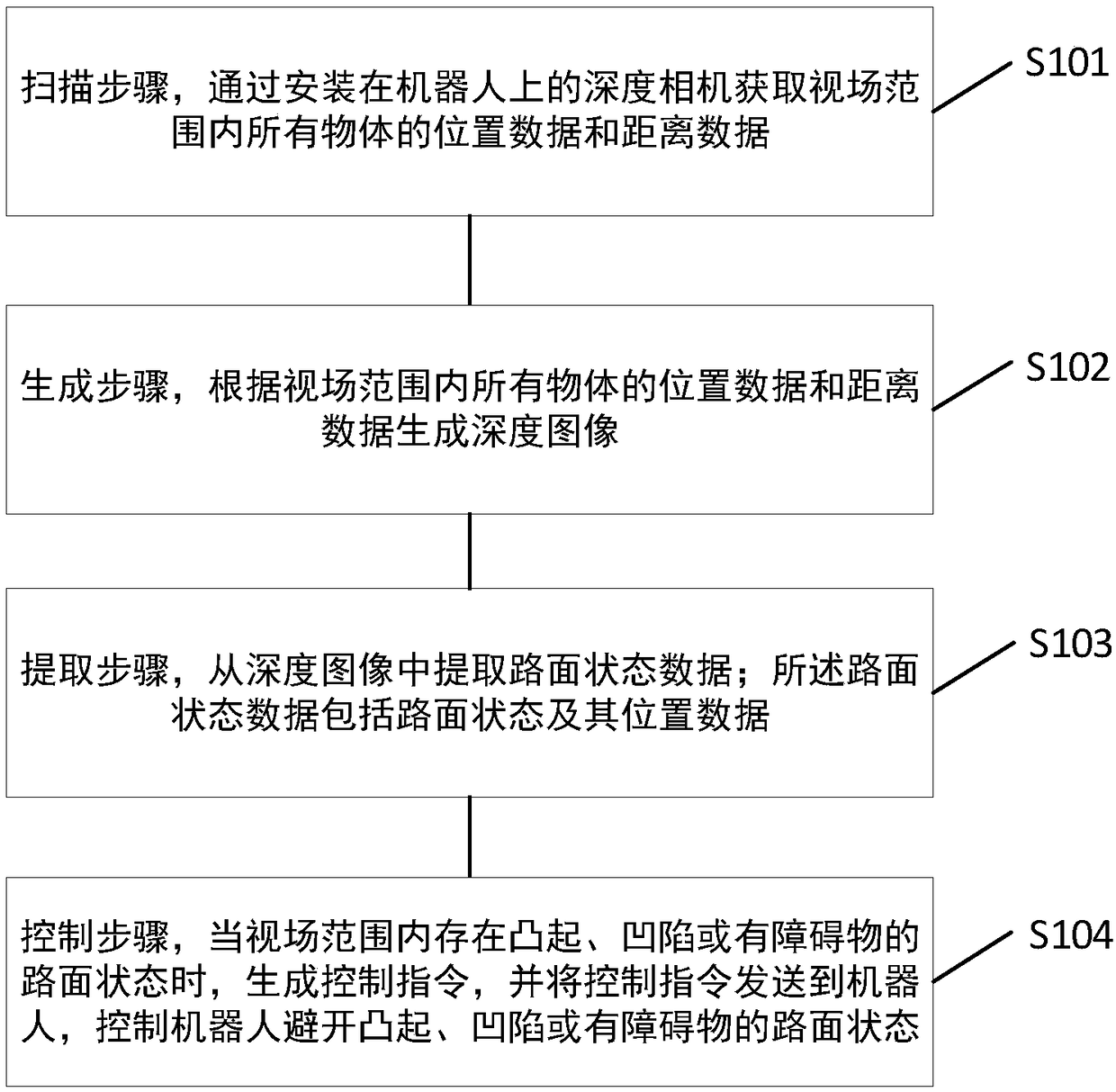
[0034] Such as figure 1 As shown, the embodiment of the present invention provides a method for detecting road surface state using a depth camera, including:
[0035] Scanning step S101, obtaining the position data and distance data of all objects within the field of view through the depth camera installed on the robot;
[0036] Generating step S102, generating a depth image according to the position data and distance data of all objects within the field of view;
[0037] Extracting step S103, extracting road surface state data from the depth image; the road surface state data includes road surface state and its position data.
[0038] The embodiments of the present invention do not limit the types and names of road surface states. Preferably, the road surface states may include flat, convex, concave, and obstacles. In the process of classifying the state of the road surface, preferably, the state of the road surface may also include approximately smooth. That is, the bumps...
specific Embodiment 2
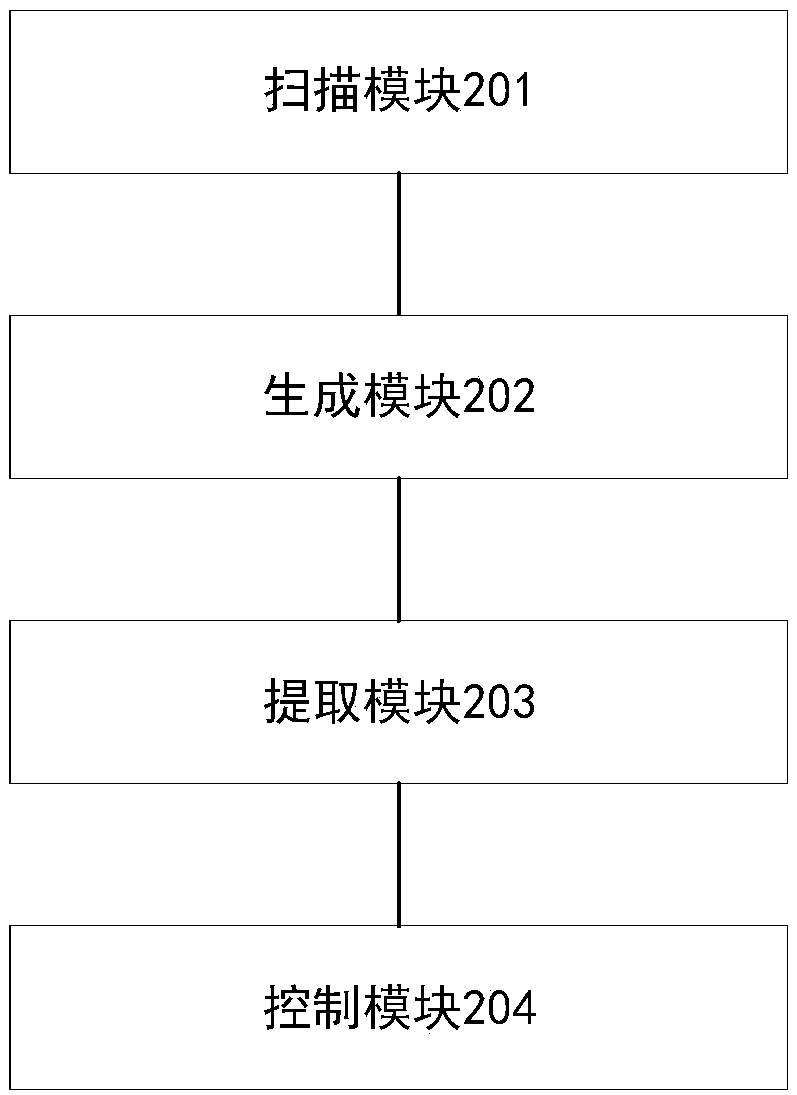
[0042] Such as figure 2 As shown, an embodiment of the present invention provides a device for detecting road surface conditions using a depth camera, including:
[0043] The scanning module 201 is used to obtain the position data and distance data of all objects within the field of view through the depth camera installed on the robot;
[0044] A generation module 202, configured to generate a depth image according to the position data and distance data of all objects within the field of view;
[0045] The extraction module 203 is configured to extract road surface state data from the depth image; the road surface state data includes road surface state and its position data.
[0046] Preferably, the road surface state may include smooth, convex, concave, and road surface states with obstacles.
[0047] Preferably, the embodiment of the present invention may also include a control module 204, configured to: generate a control instruction when there is a road surface state wi...
specific Embodiment 3
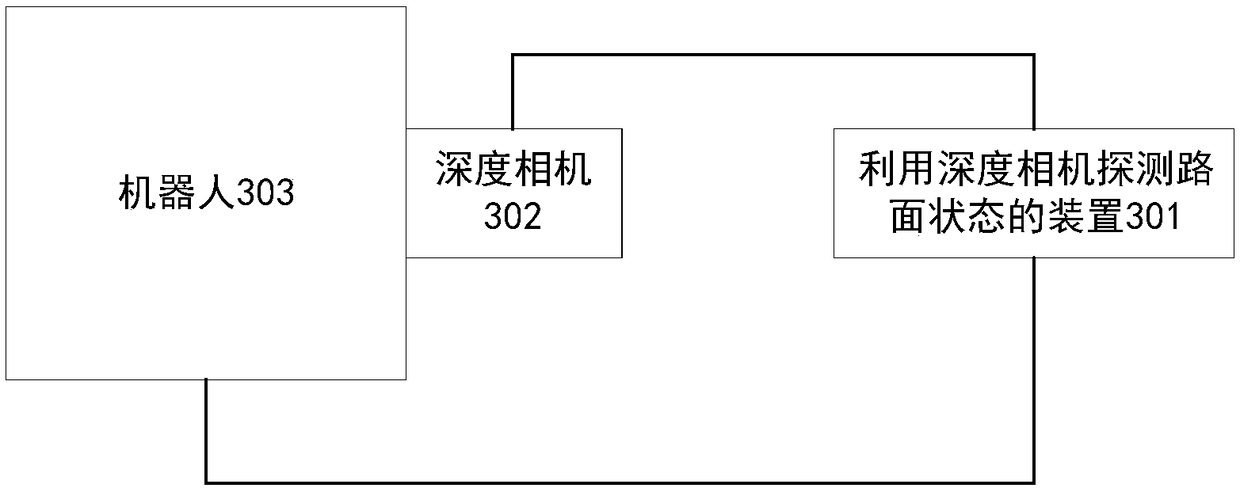
[0049] Such as image 3 As shown, an embodiment of the present invention provides a system for detecting road surface conditions using a depth camera, including:
[0050] The device 301 for detecting the state of the road surface using a depth camera in the second embodiment;
[0051] The depth camera 302 is installed on the robot 303, and the depth camera 302 is used to obtain position data and distance data of all objects within the field of view;
[0052]The robot 303 is used to avoid bumps, depressions or road conditions with obstacles according to control instructions.
[0053] Preferably, the robot 303 can also be used to send an alarm message to the device 301 when there is a problem in traveling. The advantage of this is that when there is a problem with the scanning process of the depth camera 302, or when there is a problem with the algorithm of the device 301 that causes the robot 303 to run into a problem, the robot 303 can also report the problem of the robot 30...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More