

An Iterative Fast Extended Random Tree irrt Path Planning Method for UAV
A path planning and random tree technology, applied in the direction of navigation calculation tools, etc., can solve the problem of poor repeatability of the path, achieve the effect of accelerating the convergence speed, accelerating the convergence speed, and improving the path quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with specific embodiments. The illustrative embodiments and description of the present invention are used to explain the present invention, but are not intended to limit the present invention.
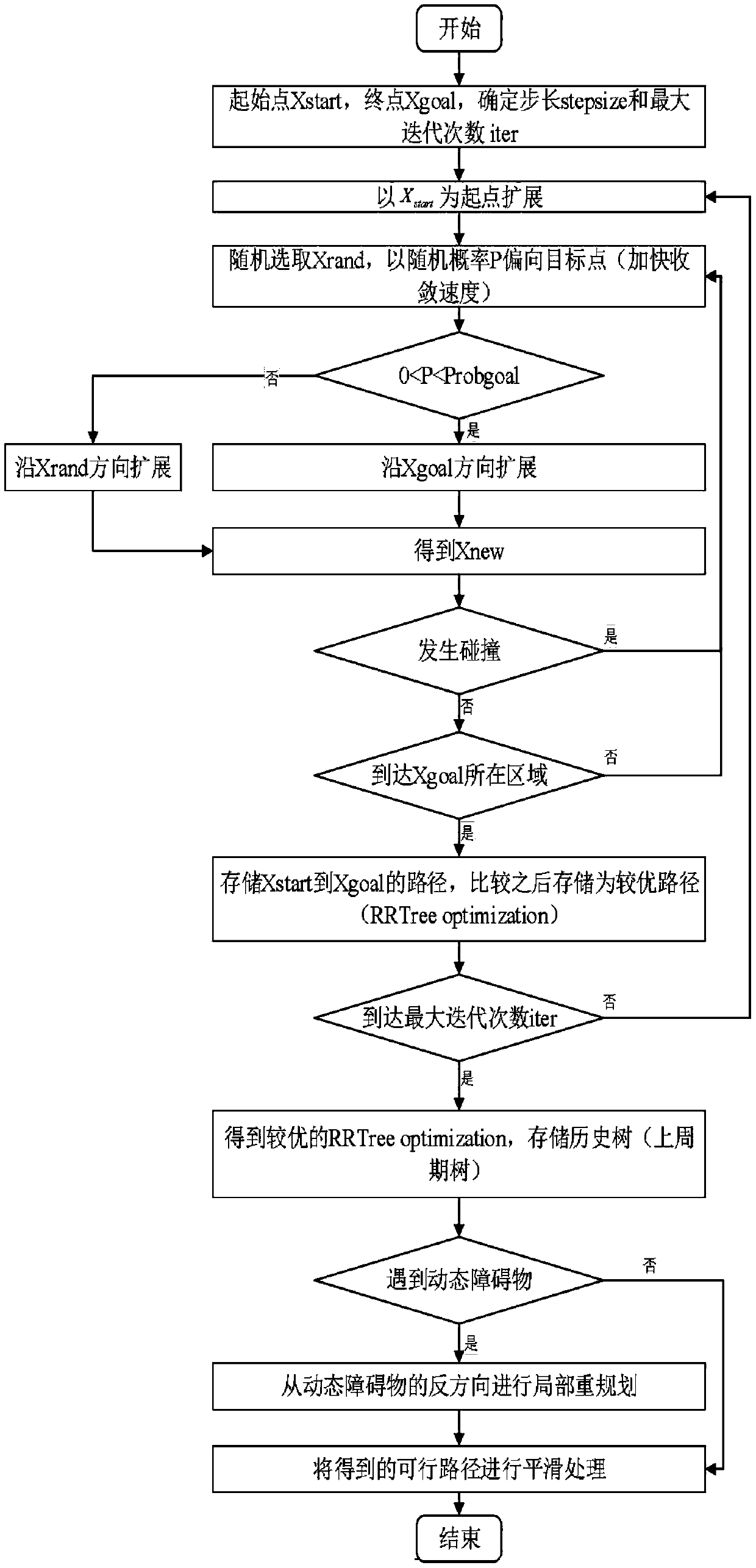
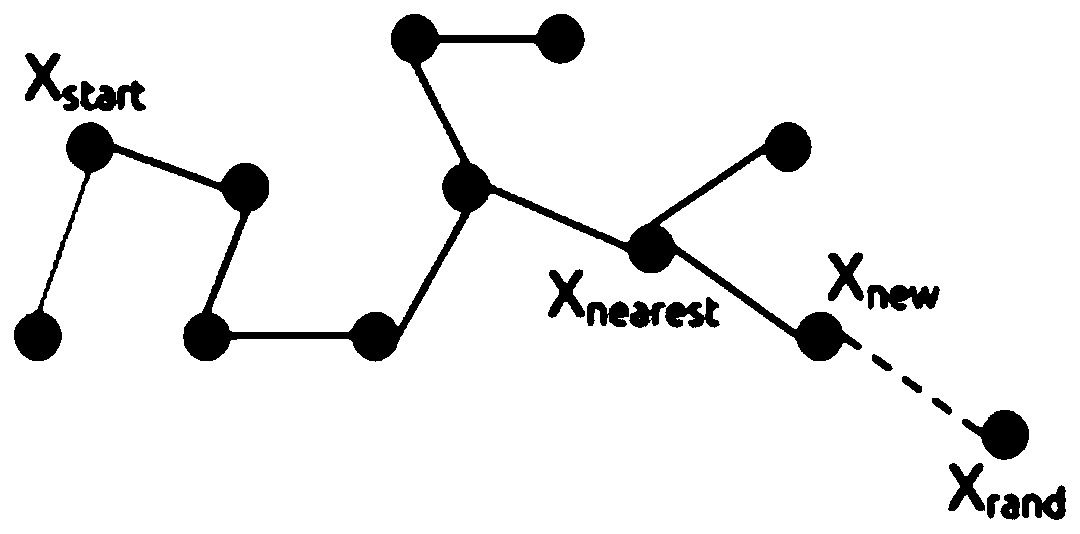
[0029] Such as figure 1 , figure 2 As shown, an iterative and rapidly expanding random tree IRRT UAV path planning method of this embodiment includes the following steps:
[0030] S1, determine the starting point X start And end point X goal , Determine the step size and the maximum number of iterations iter, with X start To quickly expand the root node of the random tree RRT, use X goal In order to rapidly expand the target point of the random tree RRT, initialize the fast expanding random tree RRT;
[0031] S2, with X start As the starting point, expand the RRT of the initialized rapid expansion random tree, and generate random points X with stepsize rand , And the random probability P is biased towards the targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More