

Route planning method of indoor blind guiding robot under dynamic environment
A blind-guiding robot and dynamic environment technology, applied in robot-related fields, to improve reliability, reduce randomness, and ensure safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
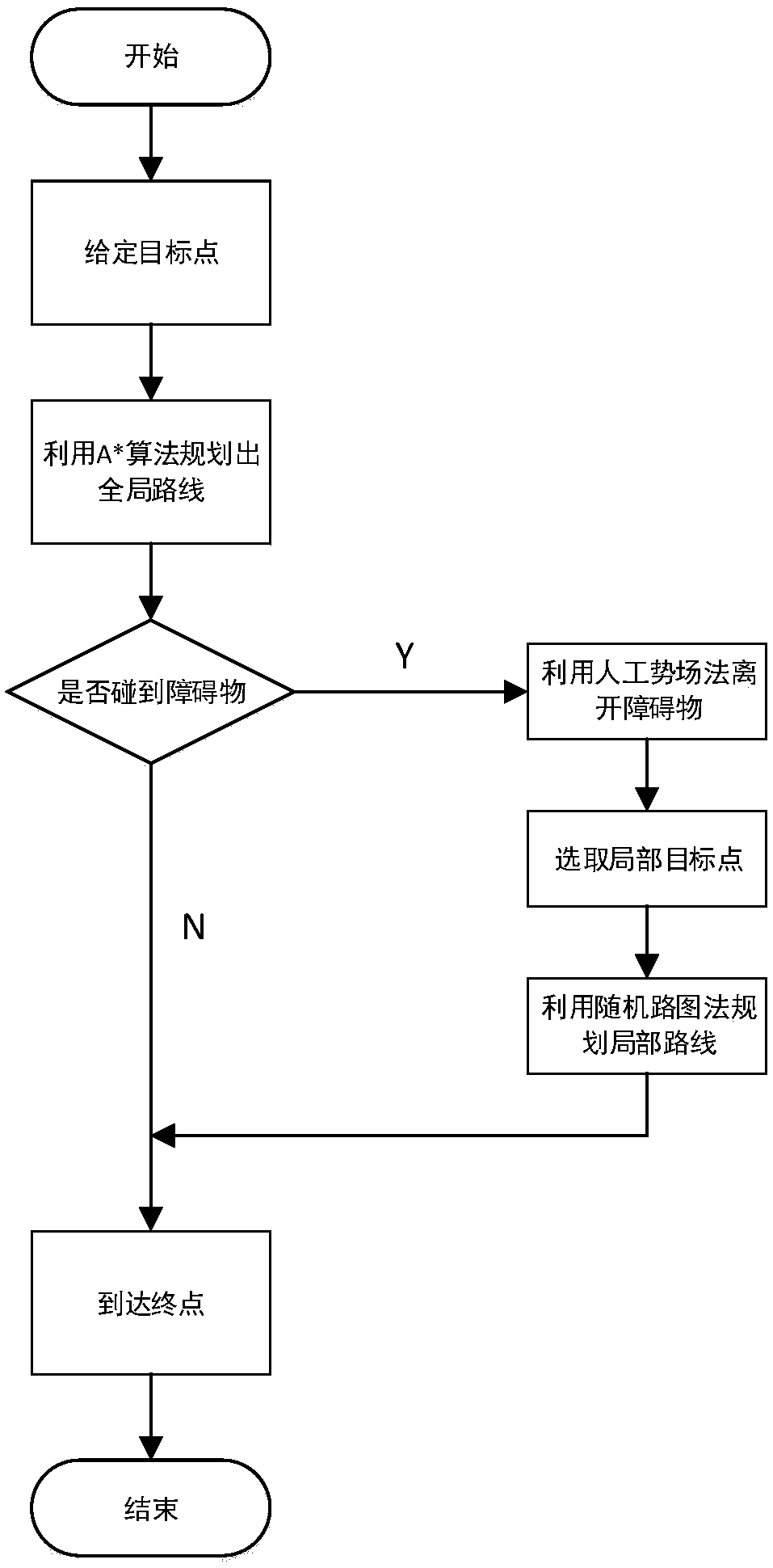
[0033] Embodiment: a kind of path planning method of indoor guiding robot in dynamic environment, such as image 3 , characterized in that it includes the following steps:
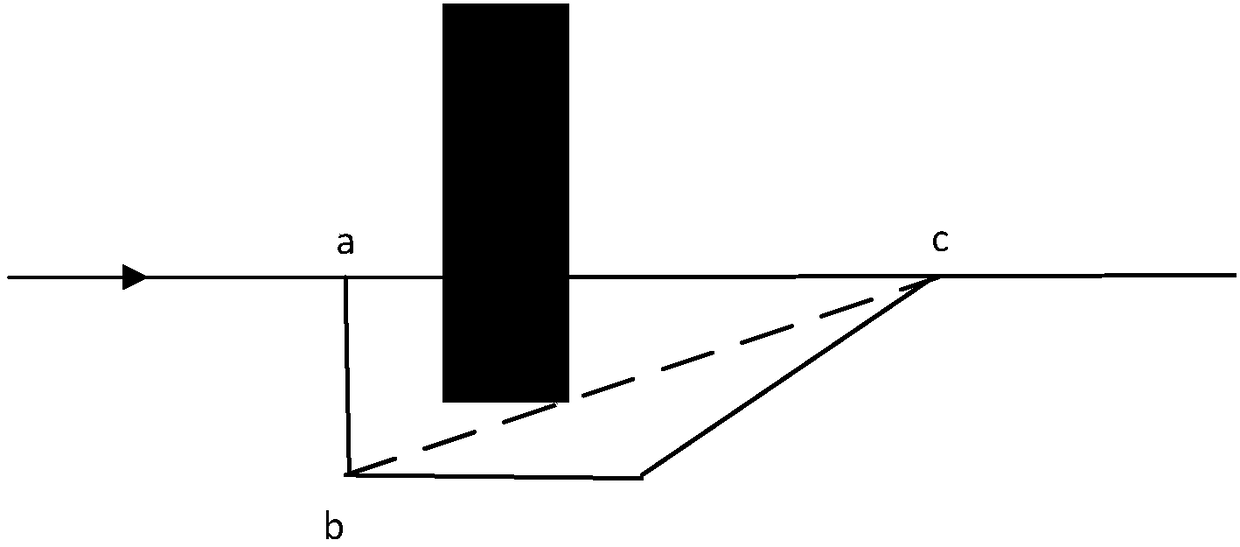
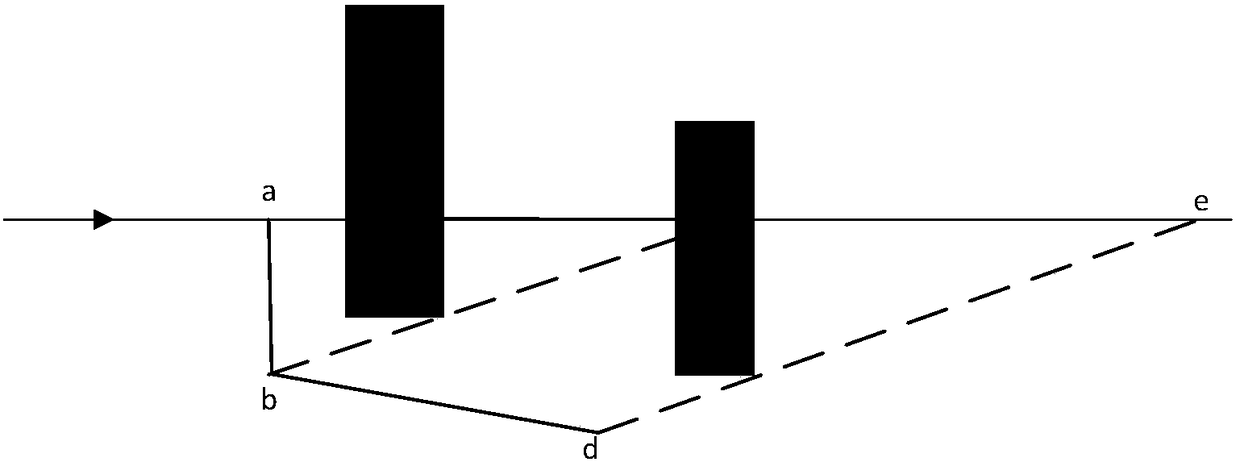
[0034] (1) Generate a grid map of the environment where the blind-guiding robot’s working place is located, and inflate the obstacles in the map. By adjusting the inflation_radius obstacle expansion parameter, the best path is as far away from the obstacles on each side as possible, so The robot can move among obstacles;
[0035] (2) Given the target point that the guide robot needs to reach, the guide robot determines the target point on the corresponding position of the grid map, and according to the current position, the target point to be reached and the grid map collected in advance, Using the most effective direct search method for solving the shortest path in the static road network, referred to as the A* algorithm, this algorithm is a heuristic search method that adds heuristic information related...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More