

Photographing control method and device thereof
A control method and position information technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve problems such as difficult cooperation and complicated control process, and achieve smooth pictures, accurate composition, Composition-rich effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] An embodiment of the present invention provides a shooting control method, which can be applied to the drone side 1 . In this embodiment, on the UAV side 1, the method can be implemented by a dedicated control device, or by a flight controller of the UAV, or by a pan / tilt controller.
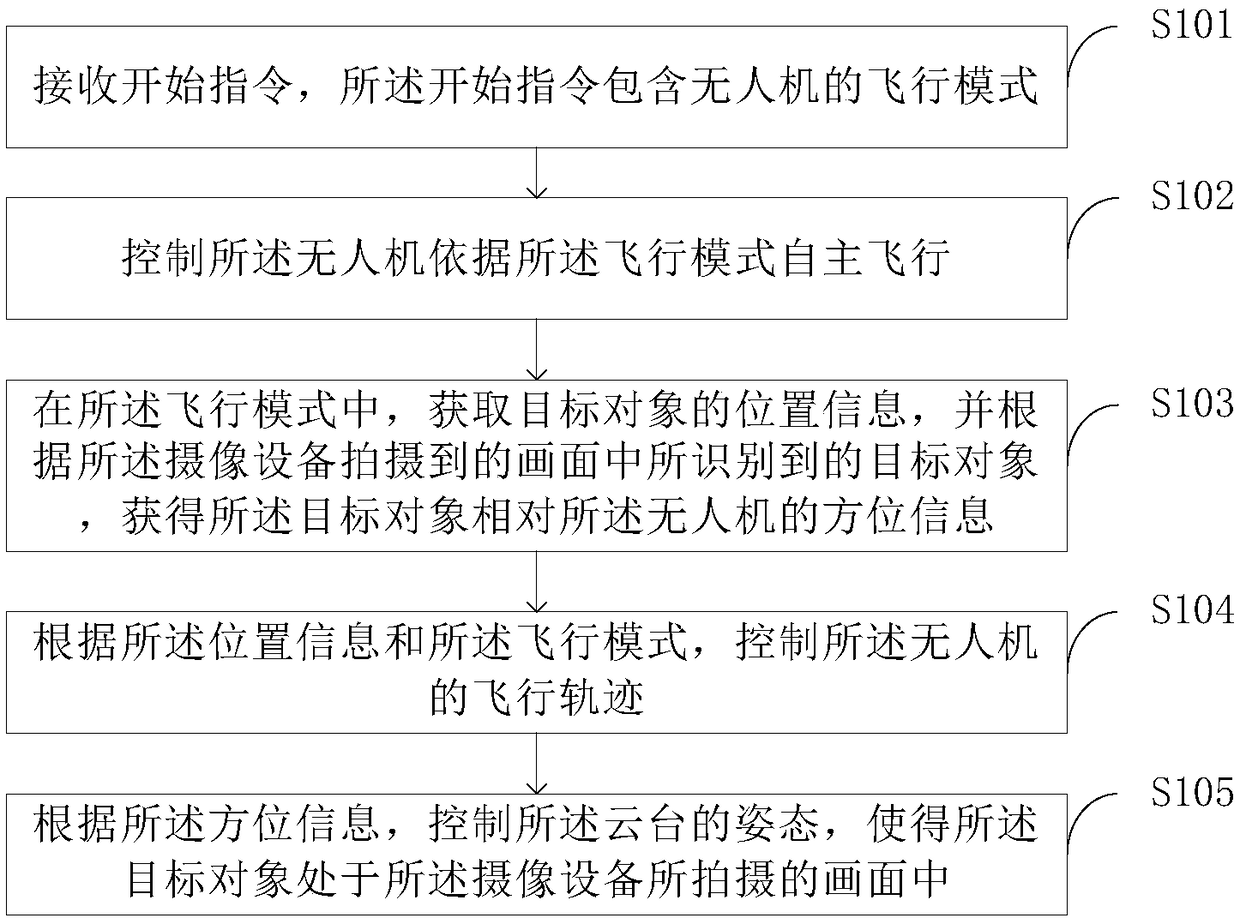
[0082] see figure 1 , the shooting control method may include the following steps:
[0083] Step S101: receiving a start instruction, the start instruction includes the flight mode of the drone;
[0084]In this embodiment, the start command can be sent from the smart terminal 2 to the drone side 1 . The smart terminal 2 may include a user interface. Optionally, the user interface is provided with an operation button for generating a start instruction, and the operation button may be a physical button or a virtual button. Specifically, when the user needs to control the autonomous flight of the drone, he can simply press the operation button to conveniently and quickly control the auton...
Embodiment 2
[0163] The embodiment of the present invention provides a shooting control method, and the method can be applied to the smart terminal 2 installed with APP. In this embodiment, the smart terminal can communicate with the drone.
[0164] see Figure 8 , the shooting method may include the following steps:
[0165] Step S801: receiving a user instruction;
[0166] Wherein, the user instruction can be directly input by the user on the smart terminal 2 . In a specific implementation manner, the smart terminal 2 includes an APP (application software) for the user to input user instructions. Optionally, the APP can be used to display the picture returned by the drone.
[0167] In some embodiments, the user instruction includes: determining the target object to be identified. In this embodiment, after the target object to be identified is determined, the method further includes: identifying feature information of the target object to be tracked in the currently displayed screen,...
Embodiment 3
[0214] Corresponding to the shooting control method in Embodiment 1, the embodiment of the present invention provides a shooting control device, which can be applied to the drone side 1 .
[0215] see Figure 11 , the shooting control device may include a first processor 11, wherein the first processor 11 is configured to execute the steps of the shooting control method described in the first embodiment above.
[0216] In this embodiment, the first processor 11 is used to communicate with the smart terminal 2, so that the first processor 11 can receive the start instruction from the smart terminal 2 and can combine the pictures taken by the drone with the unmanned Other data information etc. of the machine are sent to the intelligent terminal 2.
[0217] In this embodiment, the first processor 11 may be selected as a controller in a dedicated control device, may also be selected as a flight controller of an unmanned aerial vehicle, or may be selected as a pan-tilt controller....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More