

Curved surface wall-climbing robot for surface cleaning
A technology for wall-climbing and surface cleaning on curved surfaces, applied in the field of wall-climbing robots, can solve the problems of harsh working environment, high cost, low working efficiency, etc., to expand working environment and working capacity, facilitate replacement, and improve steering speed. and stability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
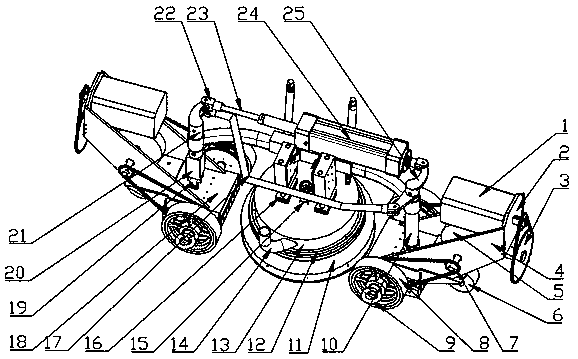
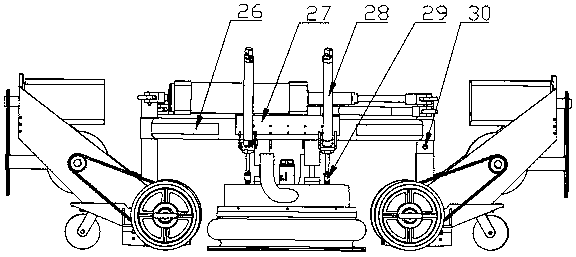
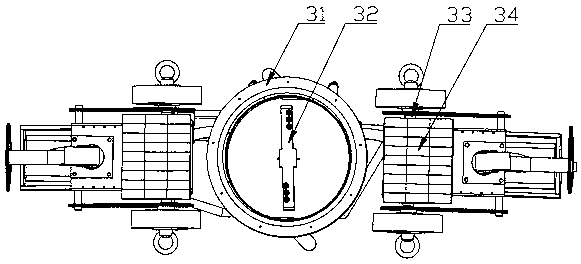
[0022] like Figure 1-Figure 3 As shown, the curved surface wall-climbing robot used for surface cleaning mainly includes drive motor 1, motor mounting plate 2, motor-differential chain set 3, side support plate 4, differential 5, universal wheel 6, differential Device—main wheel tether group 7, driving wheel 8, safety ring 9, vertical beam 10, soft rubber pad 11, clamp 12, cleaning disc 13, vacuum outlet pipe 14, rotator nozzle 15, guide air driver 16, connecting Rod 17, drive chassis 18, lower damping sleeve 19, upper damping sleeve 20, front wheel rotating claw 21, rotating hinge 22, motor push rod 23, steering motor 24, rear wheel rotating claw 25, beam 26, mounting frame 27. Cylinder 28, cylinder hinge 29, damper 30, nylon pad 31, spray rod 32, chassis wheel shaft 33, permanent magnet 34; damper 30 has a structure such as Figure 4 shown.
[0023] The drive motor 1 is installed on the motor mounting plate 2 with screws, the motor mounting plate 2 and the side support pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More