

An elevator automatic handrail belt cleaning robot
A technology for cleaning robots and handrails, used in escalators, manipulators, manufacturing tools, etc., can solve the problems of incomplete cleaning, lack of freedom of movement, and inability to clean handrails, and achieve a comprehensive effect of cleaning angles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings.
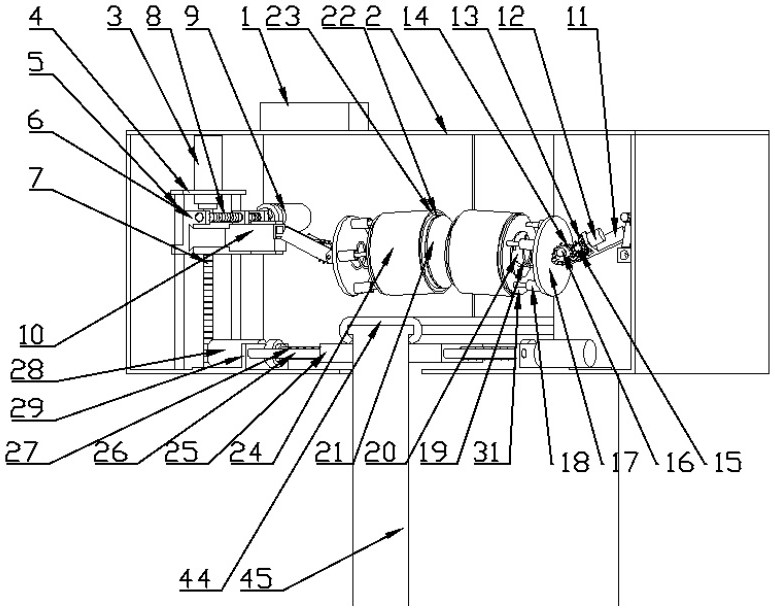
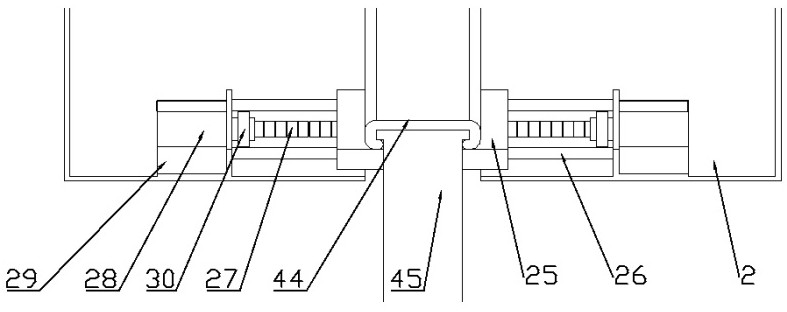
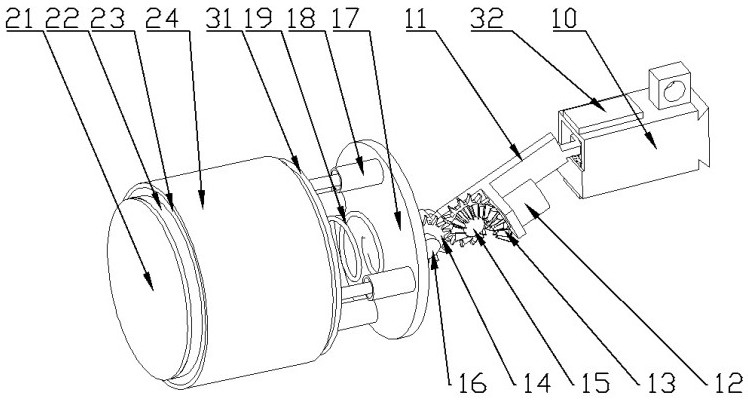
[0021] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 As shown, an elevator automatic handrail belt cleaning robot includes a control box 1, a complete machine shell 2, a lifting motor 3, a lifting screw frame 4, a lifting guide rail 5, a lifting screw 7, an up and down movable block 6, and a translation screw 8 , translation motor 9, clamping part and cleaning part; clamping part comprises clamping motor 28, clamping screw mandrel 27, clamping block 25, clamping guide rail 26, clamping motor frame 29, clamping coupling 30, The cleaning part includes translation movable block 10, up and down swing arm 11, rotating motor 12, bevel gear a13, bevel gear b, rotating gear a14, rotating gear b, gear shaft 15, rotating shaft 16, electric cylinder disc 17, electric cylinder 18...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More