

Motor drive and flight control method, ESC, power system and UAV system
A motor drive and power system technology, applied in the field of control, can solve the problems of single-ended throttle signal anti-interference, suppression of electromagnetic interference, poor timing positioning, inability to accurately control drone flight, and inability to accurately control motor rotation. Accurate positioning, strong ability, and the effect of suppressing electromagnetic interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
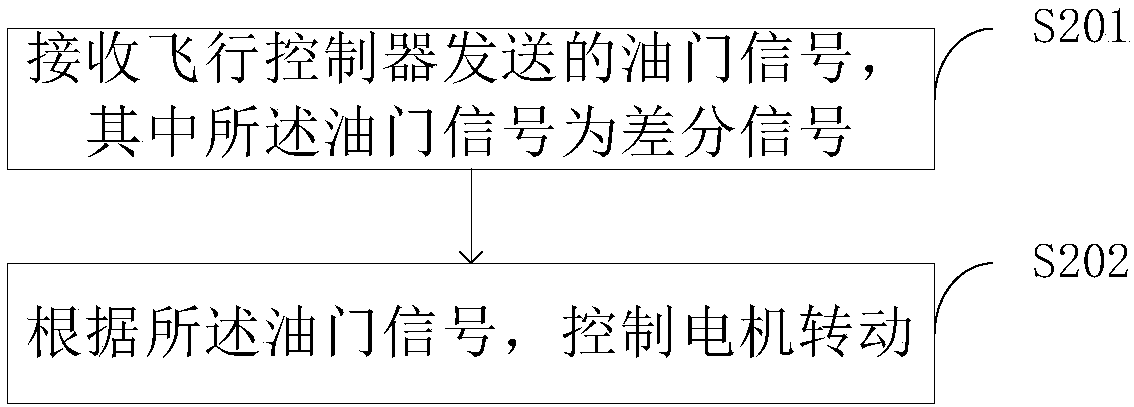
[0059] see figure 2 , the motor driving method may include the following steps:
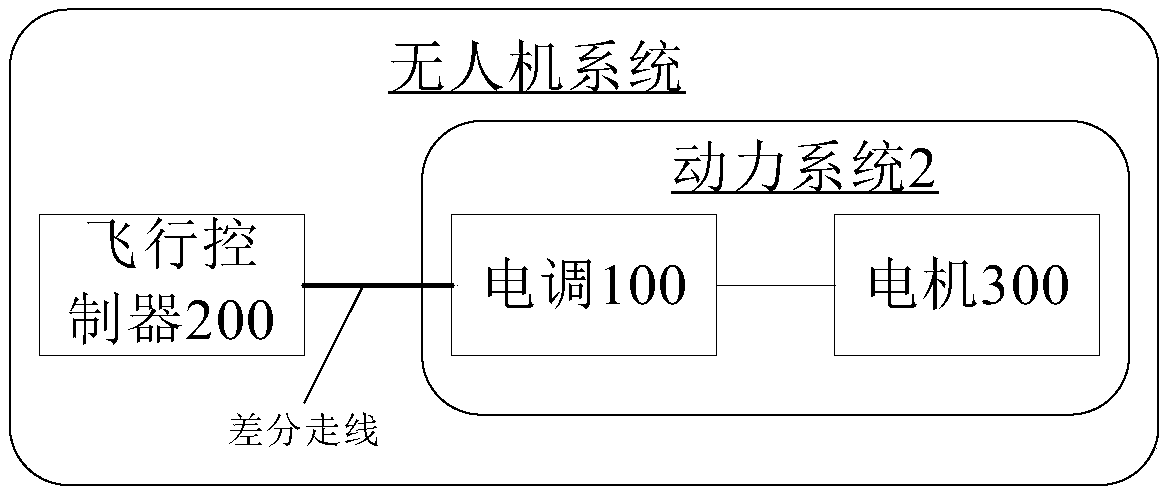
[0060] Step S201: receiving the throttle signal sent by the flight controller 200, wherein the throttle signal is a differential signal;
[0061] Wherein, the accelerator signal may include operating parameters required for driving the motor 300 such as the motor speed and the direction of rotation of the motor. In this embodiment, the differential accelerator signal is composed of two level signals with equal amplitude and opposite polarity, and the ESC 100 can receive two level signals with equal amplitude and opposite polarity at the same time, and The received two level signals are used to control the rotation of the corresponding motor 300 (that is, the motor 300 connected to the ESC 100 ).
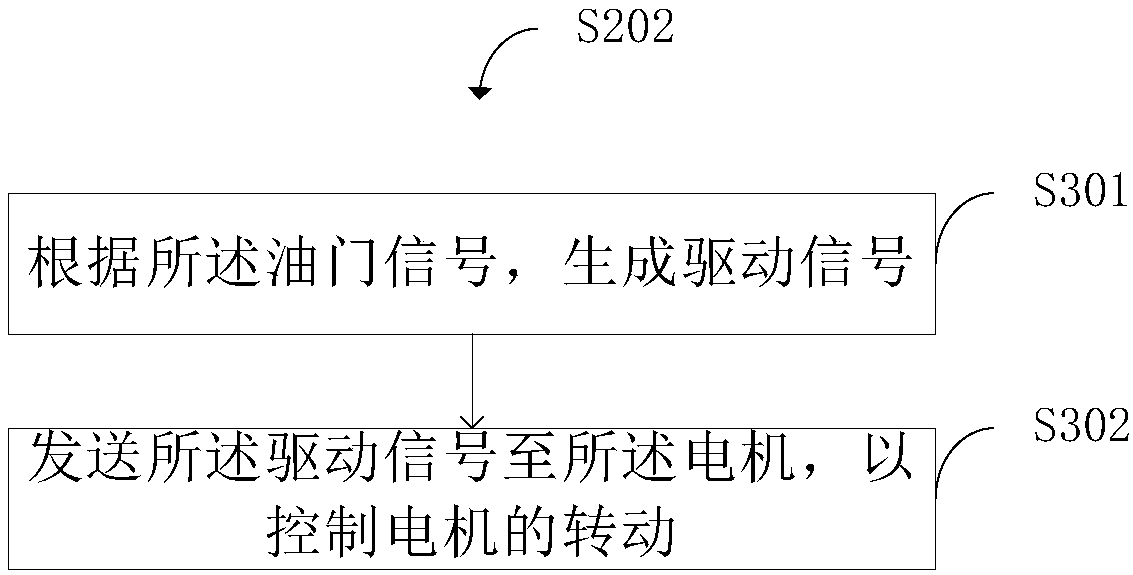
[0062] Step S202: Control the motor 300 to rotate according to the throttle signal.
[0063] After step S201, the ESC 100 that receives the throttle signal will immediately execute step S202, so as ...
Embodiment 2
[0074] see Figure 4 , the flight control method may include the following steps:
[0075] Step S401: receiving a user instruction;
[0076] In this embodiment, in order to realize flexible control of the UAV, the flight controller 200 communicates with the remote control device of the UAV, and the user instruction is sent by the remote control device. Wherein, the device for remote control of the drone may be a drone remote control or a device installed with APP (application software).
[0077] In some embodiments, the user instruction includes at least one of motor speed and motor direction, so as to control the motor 300 to rotate at a specific speed, and to control the motor 300 to rotate clockwise or counterclockwise to meet a specific power requirement. Of course, in other embodiments, the user instruction may also include signals of other motor operating parameters, for example, motor operating temperature, vibration magnitude and so on.
[0078] Step S402: Generate ...
Embodiment 3
[0085] see Figure 5 , an embodiment of the present invention provides a motor driving system, and the motor driving system may include a first processor 101 . Wherein, the first processor 101 is communicatively connected with the corresponding motor 300 for controlling the working state of the corresponding motor 300 or receiving information fed back by the corresponding motor 300 .
[0086] In this embodiment, the first processor 101 includes one or more, working individually or jointly, for executing the steps of the motor driving method described in the first embodiment above.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More