

Control method for mobile robot to determine direction of charging substrate based on wireless signal RSSI
A mobile robot and charging base technology, applied in the field of mobile robots, can solve the problems of high cost, harsh environmental lighting conditions, and high hardware computing power requirements, and achieve the effects of low cost, shortened return charging time, and wide coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Now in conjunction with accompanying drawing, the present invention will be further described:
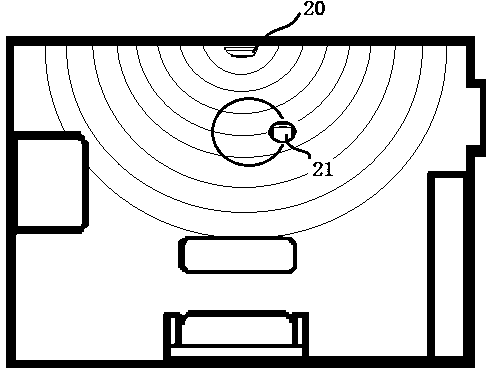
[0022] refer to figure 1 -3. The control method for positioning the direction of the charging base by the mobile robot based on the wireless signal RSSI. The mobile robot 21 includes a driving wheel and a driving motor 11 connected to the driving wheel and is arranged at the front end of the mobile robot 21. The public terminal 6 of the charging electrode. Based on the driving wheels, the mobile robot 21 can move freely, which can be set as two driving wheels and a support wheel; the charging electrode male end 6 is set as two separate copper electrodes, which are connected to the Charges while connected to a power source.
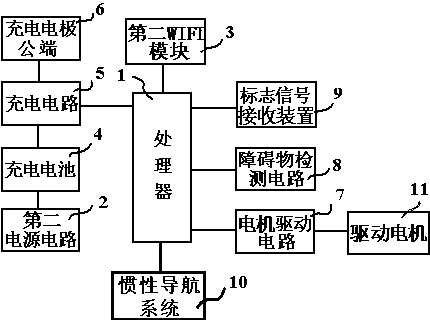
[0023] Described mobile robot 21 interior is provided with main control electronic device, and described main control electronic device comprises the processor 1 that carries out centralized control, and described processor 1 can adopt low-power consum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More