Vision-based human-machine integration safety protection control system
A safety protection and control system technology, applied in the field of robotics, can solve problems such as the inapplicability of fusion robots, and achieve the effects of avoiding insufficient target recognition, reducing time-consuming calculations, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
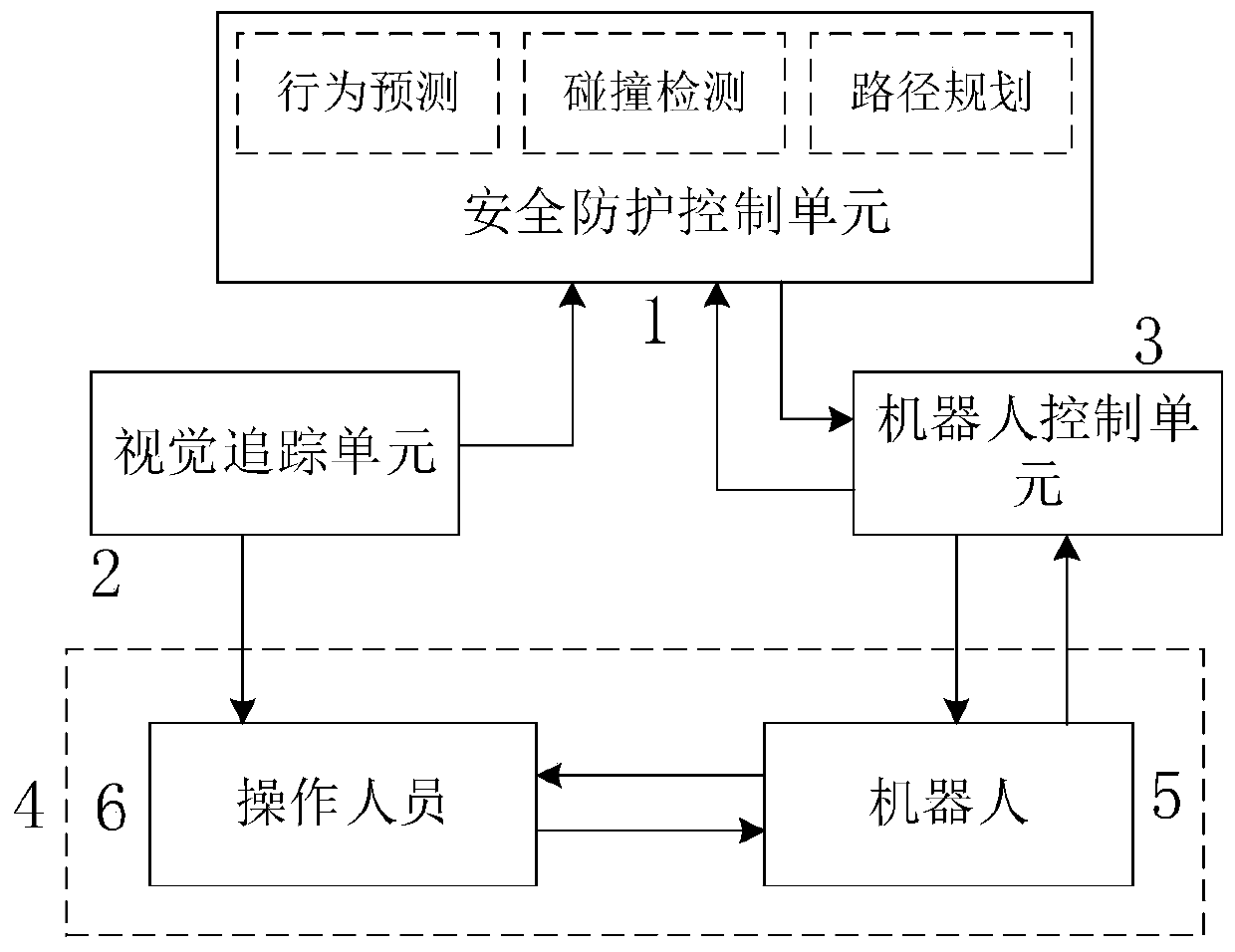
[0034] figure 1 It is a schematic diagram of the composition of the vision-based fusion robot safety protection control system of the present invention, as shown in figure 1 As shown, the vision-based human-machine fusion safety protection control system of the present invention includes a safety protection control unit, a vision tracking unit, and a robot motion control unit, wherein:
[0035] The safety protection control unit is electrically connected with the visual tracking unit and the robot motion control unit, and is used to receive the human body skeleton data of the operator collected by the visual tracking unit and the joint position data fed back by the robot control unit, and construct the robot and the opera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More