

Real-time high-precision visual mileage calculation method
A visual odometry, high-precision technology, applied in the engineering field, can solve the problems of the RANSAC algorithm looking for interior points longer, affecting the accuracy of the solution, and increasing the accumulation of errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
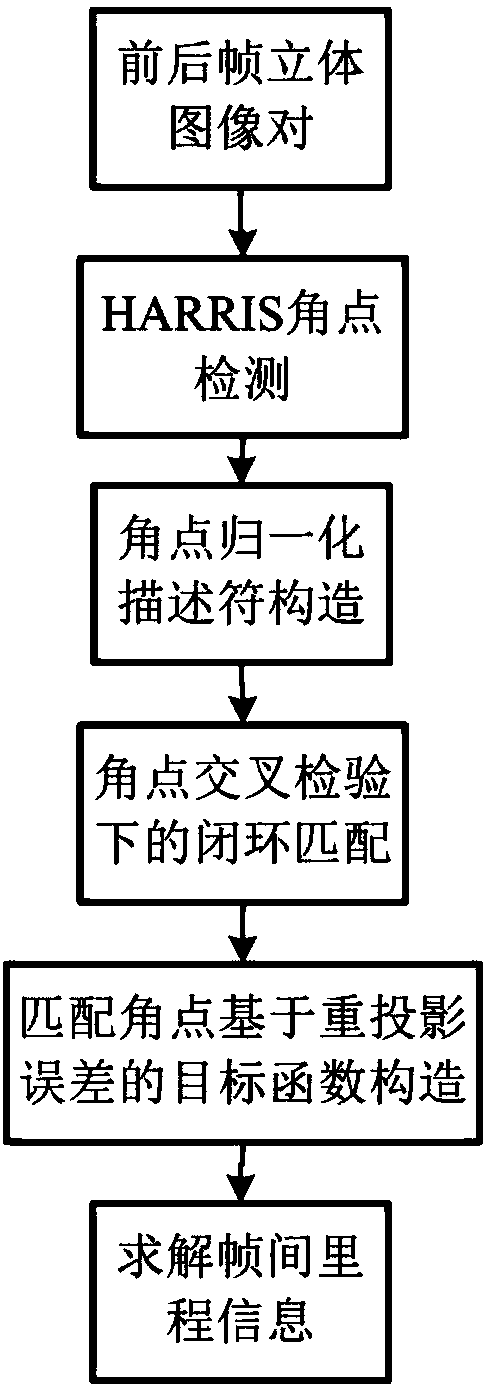
[0041] Below in conjunction with accompanying drawing and example further illustrate the application method of technical invention
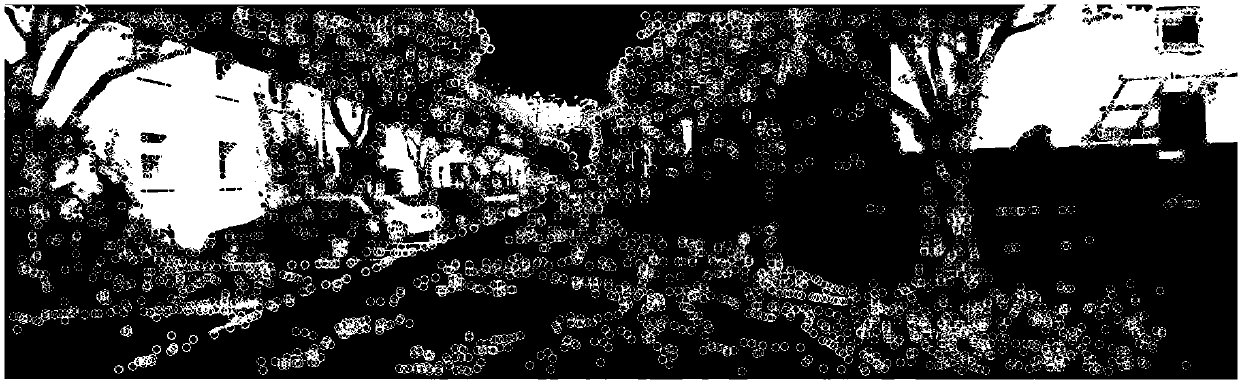
[0042] (1) Use HARRIS corner detection method for corner detection:
[0043] The corner point extraction data uses the data sequence 0 in the KITTI dataset, the image resolution is 1241×376, and the sampling frequency is 10Hz. The parameter k is set to 0.04, r is set to 0.1, and the corner points in the image can be obtained after block HARRIS corner detection.
[0044] (2) Construct the descriptor of HARRIS corner:
[0045] According to the obtained position information of each corner point, the normalized descriptor of the corner point is calculated.
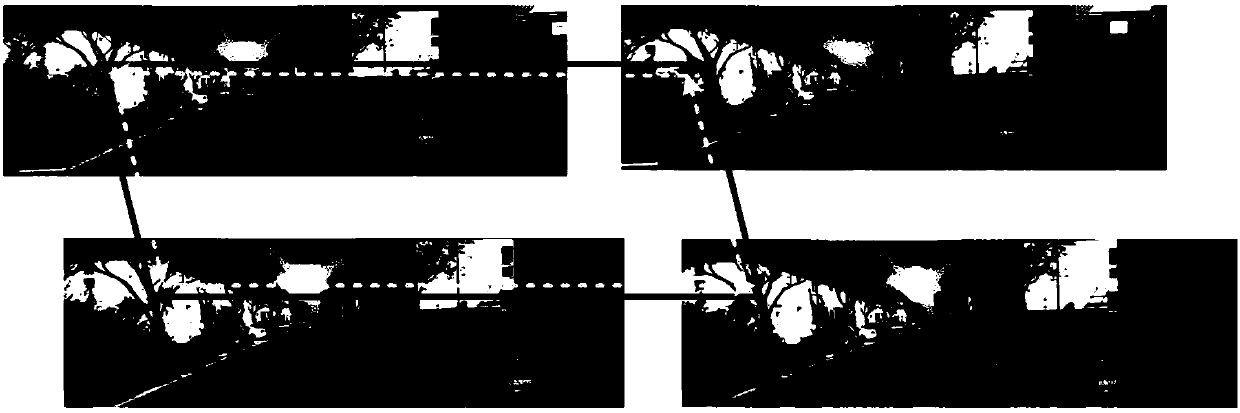
[0046] (3) Closed-loop matching under corner cross-check:
[0047] ① The corner points in the left and right stereo image pairs are matched under the cross-check according to the absolute error sum between the descriptors;
[0048] ②According to the mileage information of the previous frame, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More